There are several techniques for using USBL that are suited to different applications, each of which provides different advantages and results. USBL-squared (USBL2) is unique to Advanced Navigation. This article briefly explains each technique and the benefits of USBL-squared to help untangle any confusion on the subject.
Tech Articles
8 March 2023
Go to Article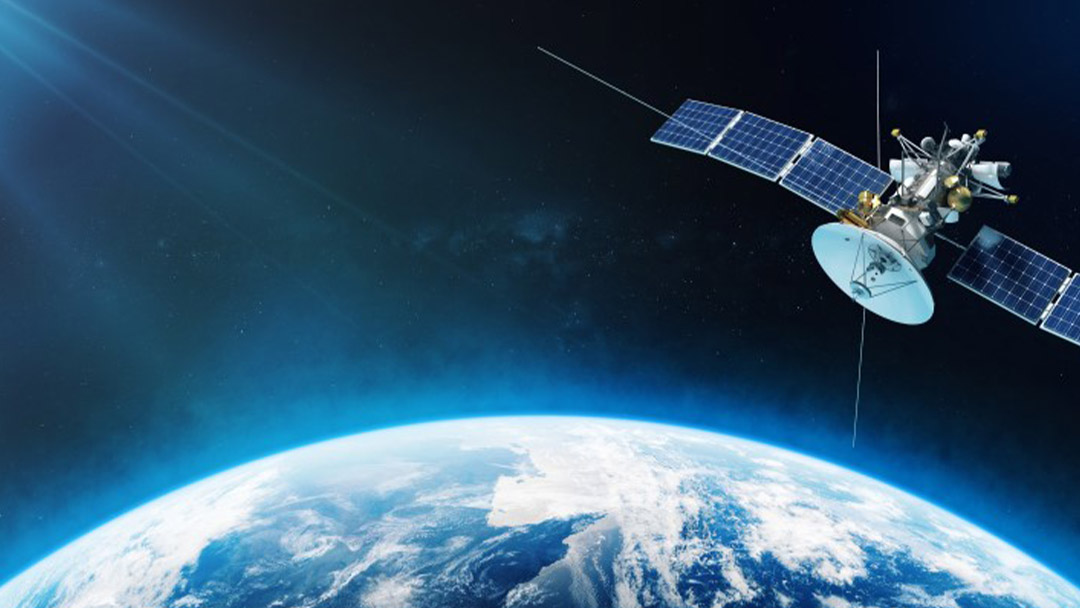
Global Navigation Satellite System (GNSS) and Satellite Navigation Explained
A Global Navigation Satellite System (GNSS) consists of a constellation of satellites orbiting the Earth in very specific trajectories. For global coverage, it is estimated that a constellation requires 18 to 30 satellites. Navigation satellites provide orbit information and accurate timing (and other services) to radio receivers specifically designed to receive those satellite signals and decode the signal message contents.
8 March 2023
Go to Article
Inertial Navigation Systems (INS) – An Introduction
An inertial navigation system, commonly known as an INS, is an electronic system that uses a variety of environmental sensors that are able to detect and measure the change in motion of an object. Using sensor data, an inertial navigation system can determine the position of the vehicle or object relative to its starting point.
24 February 2023
Go to Article
Inertial Measurement Unit (IMU) – An Introduction
The measurement of motion, specifically, acceleration, rotation and velocity, is essential to understanding the orientation of an object. It is also broadly applicable to many applications; for example, production line machines, robotic devices, vehicles, autonomous systems, gimbals, machine tools, and even robotic prosthetics.
13 February 2023
Go to Article
Inertial Guidance: A Brief History and Overview
The limitation of most navigation systems is the need for references to confirm actual position with estimated position, be it a map, a star, a satellite constellation, or a landmark. When a reference is not available, we require a different means of maintaining navigation and guidance. Using inertia as a means of detecting and measuring changes in motion has been a popular method of unaided navigation.
4 January 2023
Go to Article
The Future of the Next Frontier with the Australian Space Agency
With support from the Australian Space Agency, Advanced Navigation has developed Boreas X90, an inertial navigation system to autonomously explore the Moon and beyond to Mars, to help uncover scientific discoveries, unlock the lunar economy and inspire a new generation of space explorers.
2 November 2022
Go to Article
Benefits of Using Post-Processing Kinematic (PPK) Software in GNSS Based and Inertial Navigation Solutions
Kinematics is the study purely of the motion of objects, without concern for the forces involved causing the motion. In a navigational sense, kinematics is a bit different to the definition above. We are still wanting to gain motion information for a moving object, but the context here is to establish the true path (or as close to the truth as we can get) of the object in relation to an absolute position on the surface of the Earth.
17 October 2022
Go to Article
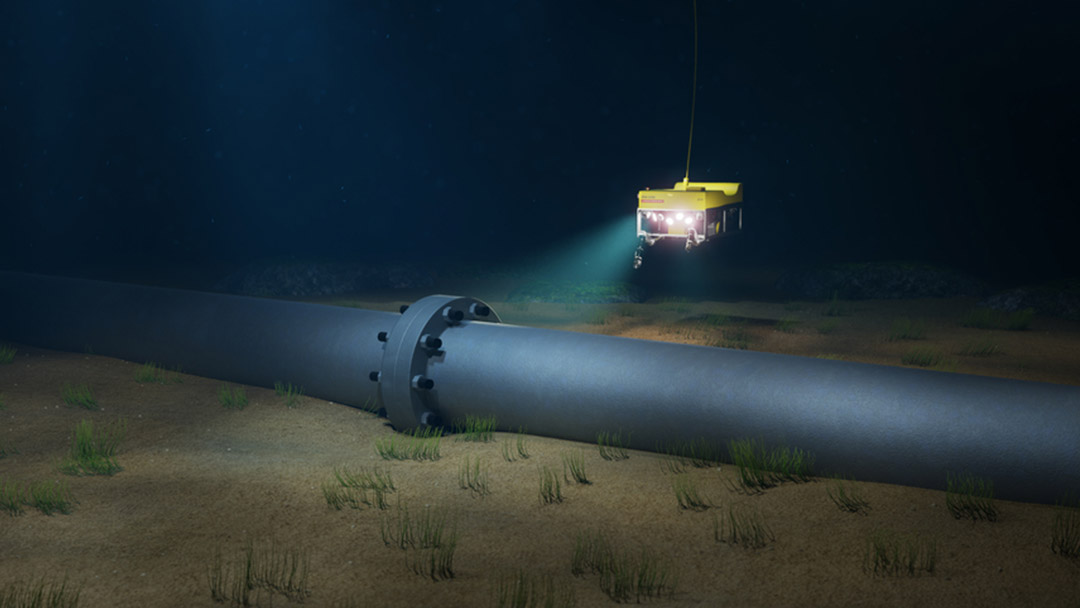
Acoustic Positioning and Navigation – An Introduction
Acoustic signaling is a method of using sound as a means of wireless underwater communications. Acoustics are used because radio waves, light waves and satellite signals cannot travel through water for any useful distance because of signal attenuation (reduction in amplitude) due to water density.
8 September 2022
Go to Article
The Future of Inertial Navigation is Classical-Quantum Sensor Fusion
Inertial navigation using quantum sensor technology is a new field of research and development that can completely revolutionize navigation systems. This novel technology increases inertial measurement accuracy by orders of magnitude over current benchmarks. This can enable absolutely reliable inertial navigation systems (INS) that can operate entirely standalone and retain accuracy over the course of years rather than months using current technology.
25 August 2022
Go to Article
Dead Reckoning for GNSS Denied Scenarios – An Introduction
Dead-reckoning is a term coined in the 1600s by ship navigators to estimate course and distance when no landmarks or stars could be seen. Using velocity, a compass and the directional effects of current and wind, ship navigators could plot or estimate a course with a reasonable degree of accuracy for the time, especially over short distances.
17 August 2022
Go to Article