
Acoustic Positioning and Navigation – An Introduction
Share:
Published on:
Table of Contents
- Introduction to Acoustic Positioning
- Why use Underwater Acoustic Positioning?
- How Does Underwater Acoustic Positioning Work?
- What Makes a Better USBL?
- Adding Absolute Position to the USBL
- Attaining Heading Underwater
Introduction to Acoustic Positioning
Acoustic signaling is a method of using sound as a means of wireless underwater communications. Acoustics are used because radio waves, light waves and satellite signals cannot travel through water for any useful distance because of signal attenuation (reduction in amplitude) due to water density. Conversely, sound travels long distances through water because of its density, and actually travels approximately three times faster through water than through air.
In a typical scenario, acoustic signals are emitted from a transducer mounted on a surface vessel to a transponder on a secondary tracked object. A tracked object, for example, could be an autonomous underwater vehicle (AUV), remote-operated vehicle (ROV) or a diver. Upon receiving the signal, the transponder immediately responds by emitting its own acoustic signal. The positioning system resolves the distance and direction of the acoustic signal from the transponder to estimate its bearing.
Accuracy of position depends mainly on the distance and depth of the tracked object from the transceiver. Various environmental factors can also influence accuracy; for example, water-layer mixing, multipath (acoustic signal bounce), background noise, and interference due to cavitation and wash from propellers and thrusters near the transducers.
Why use Underwater Acoustic Positioning?
There are many scenarios where reliable underwater positioning is necessary. For example, hydrography (marine survey) and photogrammetry, environment, habitat and wildlife research, harbor, port and river maintenance, salvage, pipeline and infrastructure deployment and inspection. Accurate position data for divers and equipment being used to perform these tasks is a requirement for many reasons, including efficiency of operations – being able to accurately locate a point of interest, and safety – the potential for loss and collision is very high.
The relatively low frequency of sound waves enables them to travel reasonable distances reliably through water. The applicable distance range depends on the frequency. Lower frequency amounts to greater distance, but lower bandwidth for data. Typically:
- 8 to 15 kHz range is approximately 10 km
- 19 to 36 kHz range is approximately 2 km
- 32 to 63 kHz range is approximately 1 km
- 55 to 110 kHz range is approximately 500 m.
In the case of Subsonus, this communicates at 30 kHz and has a 1 km range to provide a reasonable balance between bandwidth and range.
How Does Underwater Acoustic Positioning Work?
Underwater acoustic positioning systems utilize a technique called ultra-short baseline (USBL). The USBL transceiver uses hydrophones, which function as an underwater microphone and speaker, to transmit and receive acoustic signals. Transducer technology in the hydrophone is used to convert electrical energy into sound for transmission, and from sound to electrical energy during reception. A single hydrophone cannot provide bearing or directional information, so multiple hydrophones are required. These are mounted to the transceiver in an array with very precise distances and geometries between the individual hydrophones. The distance between the hydrophones is the “baseline”.
When an acoustic signal is received by the transceiver, a technique called “phase differencing” uses the tiny variations in arrival time of the signal at each hydrophone to calculate the direction from which the signal has come from. The two-way travel time between emitting the transmit signal and receiving the response is used to calculate the distance to the signal source. Using the distance and direction data, a relative position for the tracked object to the surface-mounted transducer can be determined. Note that the speed of sound can fluctuate depending on water pressure, temperature, and other factors, so this needs to be accounted for in position calculations.
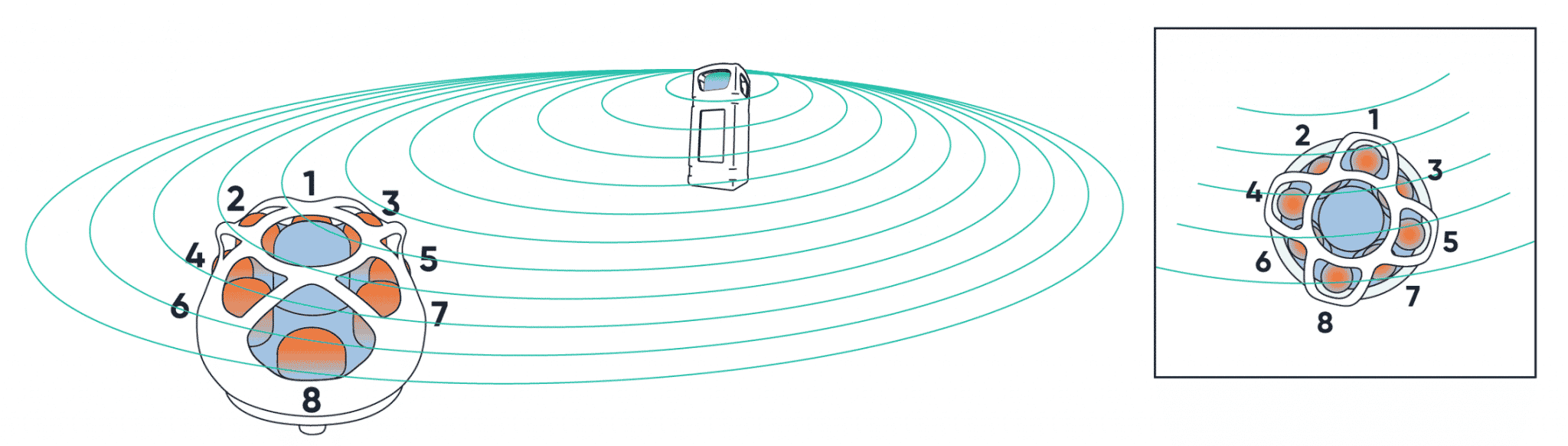
Image depicting acoustic wavefront from a transponder meeting (Subsonus) hydrophone array
What Makes a Better USBL?
Accuracy and precision of USBL systems can be improved in several ways. For example, increasing the number of hydrophone elements in the transceiver will provide more data that makes directional calculations more precise. Also, varied geometry between the hydrophones, particularly in a three-dimensional sense, will typically improve the USBL ability to resolve the source of the acoustic signal.
Another method to improve precision is to utilize a wideband, or encoded acoustic signal, rather than a simple waveform. Using a complex acoustic signal allows the USBL to better apply phase-differencing as the acoustic wavefront moves over the hydrophones. Phase-differencing improves the USBL ability to accurately resolve the difference in arrival times of the waveform, which improves precision of the calculations.
It could be said that the larger the baseline distances and the greater the number of hydrophones, the easier it is to resolve the source of an acoustic signal. However, this typically increases the physical size of the USBL, which in most cases is very undesirable as it can increase complexity of deployment and cost. To shrink a USBL device represents several engineering challenges, which is to not only decrease baseline distance without affecting hydrophone performance, but to improve signal processing to maintain accuracy from a smaller baseline. The Subsonus USBL is an example of meeting these challenges, where the unit is so compact that it can be used in a multi-transducer USBL2 (“USBL-squared”) configuration. A USBL2 configuration uses a USBL on the surface vessel and tracked object to improve accuracy by resolving acoustic signals at both ends.
Adding Absolute Position to the USBL
Based on the USBL calculations, the relative bearing and range of the acoustic source from the transducer are known. That is, the range and bearing between the transponder and transducer are known, however, the transducer position is not relative to an absolute position on the Earth’s surface. In some cases, this is sufficient, for example, when you only need to know the position of the tracked object relative to the surface vessel. However, many scenarios require an absolute position of the tracked object relative to the Earth, particularly in survey-type situations or where points of interest must be referenced to absolute position.
Injecting absolute position into the USBL is commonly achieved using a GNSS receiver, such as GNSS Compass, mounted to the surface vessel. The GNSS position data becomes an input for the USBL.
Combining absolute position and heading data of the surface vessel to the USBL transducer enables the system to synthesize this with the relative position data of the tracked object. The result provides the absolute position of the tracked object.
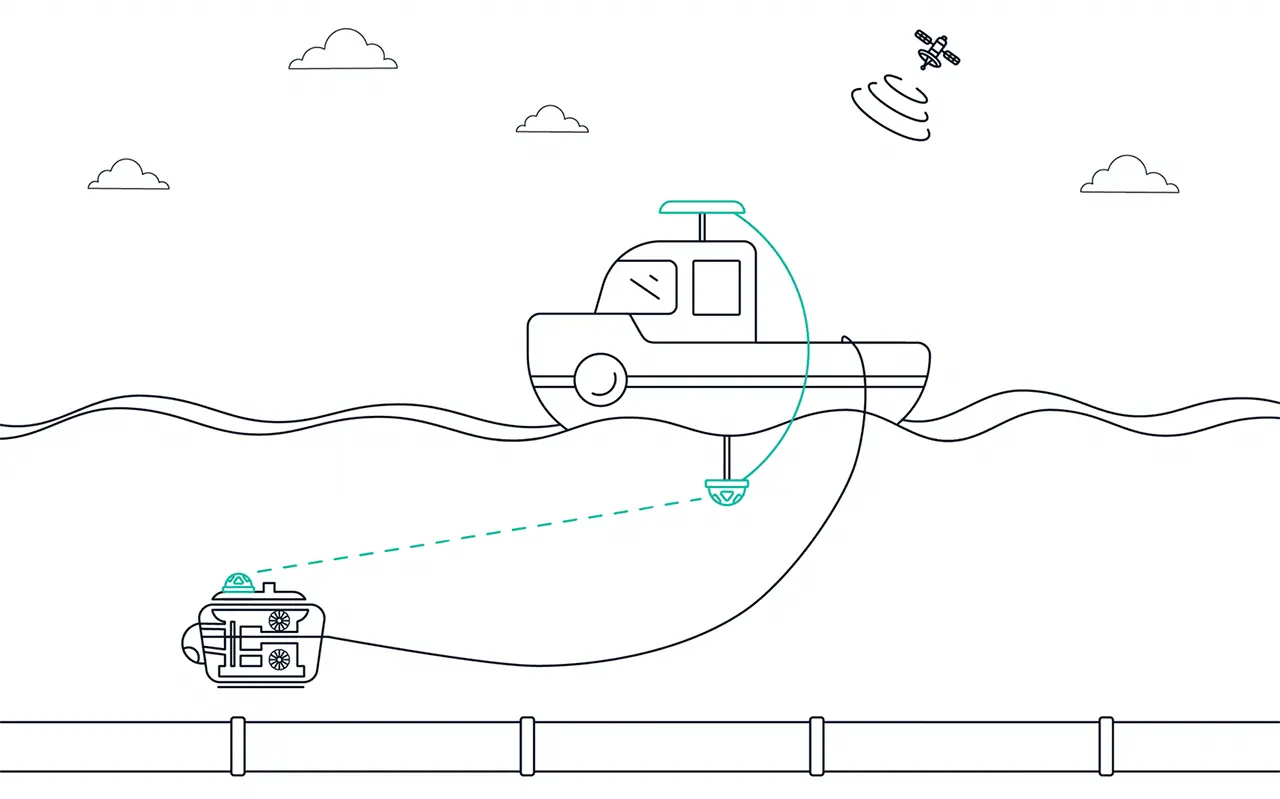
Image depicting Subsonus USBL acoustic positioning between surface vessel and pipeline survey ROV. Surface vessel USBL is connected to GNSS Compass for absolute position input
Attaining Heading Underwater
To obtain heading underwater has traditionally been through using either fibre-optic gyroscopes (FOG) or magnetic heading devices. There are two common problems with these solutions – FOG is typically very expensive, heavy and can be complicated to set up. This obviously has a bearing on the applications that it is suited to. With magnetic heading, this is not as accurate as FOG systems because magnetic north and true north are rarely the same and these devices are more prone to drift and other errors than FOG. Also, magnetometer accuracy is affected by sources of magnetic interference, such as large masses of ferrous material, which are often features of subsea vessels.
Advanced Navigation Subsonus USBL provides a reliable and accurate solution for underwater heading via its unique USBL2 configuration. Using a Subsonus USBL on the surface vessel that is connected to a GNSS Compass is capable of providing accurate position and heading data to secondary Subsonus USBLs mounted to underwater vehicles or tracked assets, using acoustics.
Obtaining absolute subsea heading data in this way provides very high levels of reliability and accuracy. It is also extremely cost-effective when compared to FOG, and because the heading is sourced through GNSS, the system is completely immune to magnetic interference.
Recent Tech Articles
How Improved Positional Accuracy Can Transform Mining Excavation
Explore the new standard in absolute positioning for GNSS-denied environments. See how the Chimera Land LVS and INS pairing anchors real machine motion.
15 June 2026
Go to Article
High-Precision Navigation at Scale for Counter Drone Technology
Unlock precision for your kinetic effector on-the-move. Discover how Advanced Navigation delivers the stabilization and supply chain speed needed for scalable counter drone defense.
18 May 2026
Go to Article
Navigating the Future of Mining Operations
Discover how to improve product quality in manufacturing through Advanced Navigation's rigorous supply chain and exhaustive validation.
5 May 2026
Go to Article