A new generation FOG has arrived
Spatial FOG Dual is not recommended for new designs. Boreas A50 & D50 now available.
View Specifications
Spatial FOG Dual (NRND)
Spatial FOG Dual is a rugged GNSS/INS that provides accurate position, velocity, acceleration, and orientation under the most demanding conditions.
Roll & Pitch
0.01 °
Heading (GNSS)
0.01 °
Bias Instability
0.1 °/hr
Position Accuracy
10 mm

Spatial FOG Dual is an industry-proven GNSS/INS and AHRS. It combines high accuracy fibre optic gyroscopes, accelerometers, magnetometers, and a pressure sensor with a dual antenna RTK GNSS receiver. These are coupled in an AI-based fusion algorithm to deliver accurate and reliable navigation data. Spatial FOG Dual is compatible with our post-processing kinematic (PPK) software Kinematica.

Key Dates for Product End of Life Program
Jan 12, 2026: Not recommended for new design (NRND) – Notification period.
July 13, 2026: Last Time Buy (LTB) – Last date to place final orders for Spatial FOG Dual.
July 13, 2027: Last Time Ship (LTS) – Final manufacturing run and delivery.
July 13, 2028: End of Support – Engineering and technical support ends.
Features
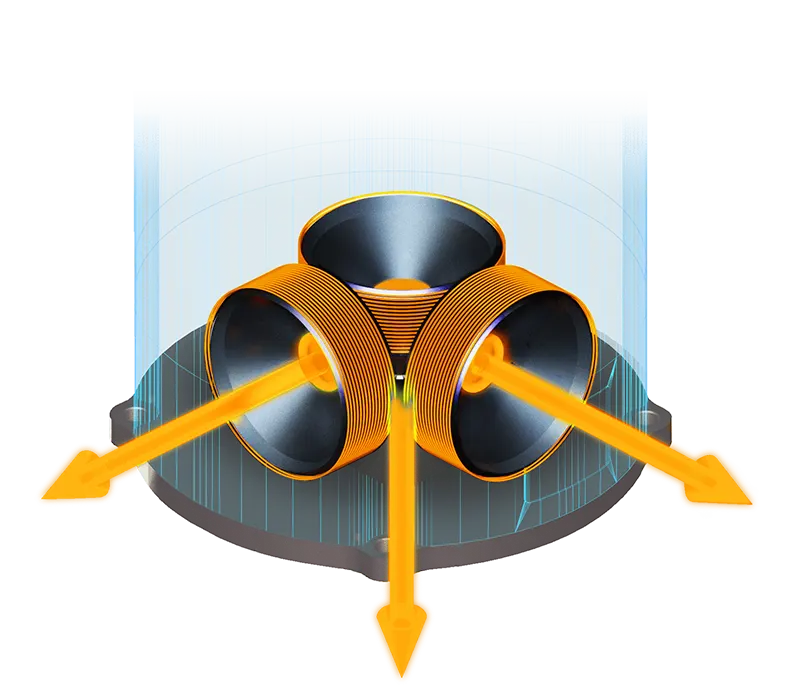
High-Accuracy FOG
Spatial FOG contains the EMCORE TAC-450 fiber optic gyro IMU, which provides very accurate inertial data, beyond the best MEMS technology available. This allows Spatial FOG to achieve very high accuracies and dead reckon without GNSS for extended periods of time. Despite the high accuracy FOG IMU, Spatial FOG has a very competitive price tag that is lower than many MEMS systems on the market.
AI Navigation Algorithm
Spatial FOG features Advanced Navigation’s revolutionary AI neural network sensor fusion algorithm. It was designed for control applications and has a high level of health monitoring and instability prevention to ensure stable and reliable data.

Reliability
Spatial FOG has been designed from the ground up for mission critical control applications where reliability is very important. It is built on top of a safety oriented real time operating system and all software is designed and tested to safety standards with fault tolerance in mind. The hardware is designed and manufactured to mil standards.
Dual Antenna RTK GNSS
Spatial FOG Dual contains a dual frequency RTK GNSS receiver that provides up to 10 mm accuracy positioning and supports all of the current and future satellite navigation systems, including GPS, GLONASS, Galileo, and BeiDou. Dual antenna heading provides high accuracy heading that is not impacted by magnetic interference and has no motion requirements.
Peripherals
Spatial FOG Dual features two general purpose input output pins and two auxiliary RS232/RS422 ports that support an extensive number of peripherals. Including odometer based input for ground vehicles, DVLs and USBLs for underwater navigation, NMEA input/output and more.
Applications
Marine Surveying
Land Surveying
UGVs
Helicopters
Antenna Targeting
Motorsport
Robotics
Specifications
Navigation
Sensors
Accelerometers
Gyroscopes
Magnetometers
Pressure
GNSS
Communication
Hardware
Downloads
Datasheet
Reference Manual
3D Model
INS Manager – Desktop
Version 8.1
26 Jun 2026
INS Manager – Deskop is used for testing, configuration, firmware management and logging with Advanced Navigation’s INS devices. Java 11 is required to run INS Manager – Desktop. Adoptium JRE 11 is the recommended Java installer. Refer to respective INS Manuals for the user guide.
Spatial FOG Dual Firmware
Version 1.8
07 Jul 2025
Firmware for all Spatial FOG Dual hardware versions. This can be loaded onto Spatial FOG Dual using the Spatial FOG Manager software. The change log can be found in the Spatial FOG Dual reference manual.
Spatial FOG Dual SDK
Version 7.3
28 Aug 2024
The Spatial FOG Dual SDK provides example source code for interfacing with Spatial FOG Dual through the AN Packet Protocol. The languages provided are C/C++, Java, and .Net C#.
Related Articles

Unleashing Precision: Advanced Navigation Fuels Orient Express In the High-Stakes America’s Cup
22 August 2024
View Post
Spatial FOG Dual Helps Ultrabeam’s Axolotl Amphibious Hydrographic Survey Craft Stay on Course Both on Land and in Water
7 March 2023
View Post