Underwater Navigation & Robotics
Underwater Navigation Solutions and Robotics Technology
Advanced Navigation has enjoyed great success in the underwater navigation sector and continues to invest in research and development to provide better solutions for successful operations in this incredibly challenging environment. Underwater applications require equipment that can withstand the most strenuous conditions as well as deliver improvements in efficiency, safety and reduced carbon emissions – we understand that. We also understand the need for designing and building tools for subsea users that will provide not only commercial benefits, but will assist in improving our interaction with underwater environments. Our clients cover a vast array of below-water applications, ranging from hydrography, undersea survey, remotely operated vehicle (ROV) and autonomous underwater vehicle (AUV) control and navigation, reef and habitat monitoring, research, and inspection of critical infrastructure.
Advanced Navigation seeks to not only assist you in navigating exactly where you want your vessels or assets to be below the waves, but to leverage our expertise in precision robotics, navigation and artificial intelligence to create new horizons that will mutually benefit human effort and sustainable interaction with marine habitats and lifeforms.
Advanced Navigation has long understood the benefits of artificial intelligence and machine learning using artificial neural networks, not only in its areas of expertise, but the widespread adoption of this technology to create better, more responsive, responsible, and sustainable products.
Trusted by the world’s most innovative companies
Technologies
Inertial Navigation Systems for Subsea Navigation
Advanced Navigation has a range of inertial navigation systems (INS) that are based on both MEMS and fibre-optic gyroscope technologies. These cover a range of performance grades that makes them suitable for an array of subsea applications, including autonomous underwater vehicle (AUV)/remotely operated vehicle (ROV) and submarine vessel navigation and hydrographic survey.
Boreas DFOG products feature gyrocompassing capability that enable them to rapidly establish heading even in conditions of high dynamic motion, without requiring GNSS or magnetometers. The reliability of data from the Boreas system provides very high levels of confidence in determining a relative or absolute position of a vehicle or vessel. Additionally, Boreas is much less affected by sources of magnetic interference, which are common to sub-marine vessels, ROVs and AUVs.
Advanced Navigation INS supports integration with a wide range of subsea aiding sensors such as DVL and USBL to enable higher accuracy positioning over extended distances. Our products are designed to be extremely compact and light for easier integration and, for high sensitivity systems and smaller vehicles, the reduced mass minimizes effects on ROV/AUV control or movement.
As with all Advanced Navigation products that support GNSS aided navigation, the systems are multi-frequency and multi-constellation straight out of the box with support for RTK to meet the most demanding requirements.
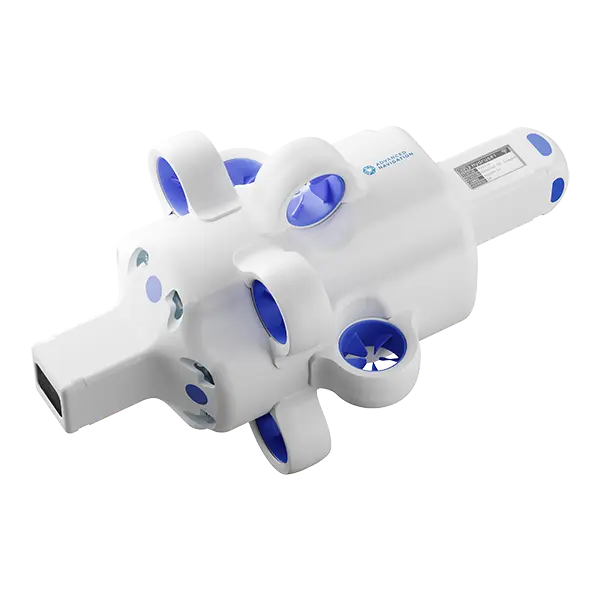
Ultra-Short Baseline (USBL) Acoustic Positioning System and Underwater Navigation
For subsea applications, such as remotely operated vehicles (ROV), autonomous underwater vehicles (AUV), and asset and diver tracking, the Subsonus system provides an incredibly flexible and scalable acoustic navigation solution. Subsonus and Subsonus Tag units feature an inertial navigation system and high refresh rate processing for very high-quality data. The Subsonus transducer and Subsonus Tag transponder can be used in any of the following configurations:
1. USBL2 (“USBL-squared”) – A unique architecture that utilizes Subsonus USBL transducers on both vessels and tracked assets instead of Subsonus Tag transponders. By processing and resolving relative USBL bearings and orientation at each transducer, this multi-point USBL system delivers noticeably improved accuracy and precision, error correction, uncertainty, latency, and speed of sound measurement. The additional navigation data allows the sophisticated fusion algorithm to analyze the system and utilize full data from each transducer.
Attach a GNSS Compass to the surface vessel for reliable absolute position data that is acoustically transferring between the Subsonus units. Obtaining absolute heading data in this way is extremely cost-effective when compared to FOG, and because the heading is via GNSS, the system is immune to magnetic interference and is markedly more accurate than magnetic heading.
Note that this architecture is not the same as “iUSBL“, which is essentially a reversal of normal USBL-transponder roles, where the USBL is on the roving vehicle.
2. USBL to Transponder – USBL architecture for reliable asset tracking data. This configuration is also excellent for remote sensing applications. In this scenario, Subsonus Tags are placed on assets, such as buoy moorings, in such a way as to enable remote detection of changes in the position or orientation of the asset. This significantly reduces routine inspection costs. Note that a fully charged Subsonus Tag can remain active for up to 18 months.
Autonomous Underwater Robots
Hydrus represents a new era in underwater robotics for data capture and survey. Hydrus is a micro hovering AUV that is not only equipped with the most advanced navigation, communication and propulsion systems of any subsea vehicle, but it hugely simplifies subsea survey, inspection and data capture. Hydrus takes the revolution that occurred with aerial drones into underwater space, including:
- No specific skills or training are required for the operation
- Incredibly simple mission and task-oriented deployment
- Unrestricted transportation
- One-person hand-held launch and retrieval
- DVL, USBL, INS, optical/acoustic modem
- Flight safe and can be carried in luggage
- Fully wireless data transfer and charging
- Fully georeferenced high-resolution still image and video, 3D acoustic point cloud survey and water data collection.
The traditional massive logistics, costs and carbon emissions of hitherto undersea survey applications are conquered by Hydrus. From knee-deep to 300 m depth, Hydrus is capable of servicing an almost endless array of applications from survey, research and habitat monitoring to hull and infrastructure inspection to object classification and detection. The Hydrus system means that exploration and research of underwater realms are no longer limited to marine specialists.
Applications of Subsea Navigation Systems & Robotics
Our innovations are bringing new levels of operability, performance and versatility that are assisting our subsea clients achieve objectives more effectively and efficiently than ever before.
ROV/AUV/USV Navigation
Submerged environments present very special and difficult challenges that can become impossible for human divers to overcome. Diving at depth and its inherent dangers, coupled with the need for improved efficiency have made alternatives an absolute necessity. Mechanized divers in the form of ROV, AUV and specialized underwater vehicles has dramatically reduced the need for human divers, however, also comes with its own challenges.
Today’s world demands rapid and precise execution of tasks to minimize environmental impacts, reduce carbon emissions, resource use and to keep costs down. Marine and subsea operations are traditionally extremely expensive through the use of large vessels, specialized crew and heavy, complex equipment. This old paradigm is undergoing huge change due to the advent of autonomous systems and the application of task-centric artificial intelligence.
Lightweight uncrewed surface vessels (USV) and autonomous underwater vehicles (AUV) can quickly perform inspection missions, with oversight and decision making performed on-shore to create new levels of overall efficiency. UAVs (uncrewed aerial vehicles) are even being used to deploy and retrieve AUVs offshore. Repetitive inspection tasks, for example, off-shore wind turbine footings and navigational buoy moorings can be inspected using the Hydrus micro hovering AUV. The robot can even remain resident to the area, charge and deploy itself and make decisions based on observation of specific phenomena.
Vessel Navigation Systems
Navigation systems are becoming increasingly sophisticated as subsea technology improves. This means more accurate heading and position that can integrate GNSS for absolute position, fibre-optic gyro-compassing for non-magnetic heading and navigation through USBL and DVL acoustics.
Simple integration is increasingly important as are SWaP-C and the ability for navigational devices to be adopted across many varying vehicle types and for differing applications. Advanced Navigation products feature a common API to enable them to be readily integrated and communicate with your other systems, such as visual data capture and vehicle control modules. The Advanced Navigation messaging protocol is standard across products, meaning you can change the performance grade of the navigation system without additional engineering.
Similarly, for applications such as ROV and AUV deployment, a holistic navigation solution that seamlessly integrates GNSS with surface vessel and subsea assets can deliver better overall results. It can reduce the amount of equipment required, drive down capital expenditure and potentially provide a longer term solution.
Knowing where your “blind” subsea vehicle is, is paramount to accomplishing missions efficiently and without re-runs. Whether you manufacture or operate ROVs or AUVs, the better your ability to navigate and control your equipment, the less time is spent acquiring position and the more time is available for actual missions. If you are providing ROV and pilot services or any other service that requires precise navigation either with or without GNSS, Advanced Navigation products cover the gamut of subsea navigation applications.
Surveying, Hydrography & Bathymetry
Detailed mapping of the seabed is increasingly important for the laying of vital communications cables that connect different regions of the world and the installation of ocean based energy infrastructure. Knowing the contour and makeup of the seabed strata is critical to safe and reliable cabling, pipelines, footings and moorings. Not only by mapping its shape but also gaining understanding of how it changes over time and how it affects oceans, lifeforms and habitats, even climate. The Seabed 2030 project is testament to this need. The project aims to bring together all available bathymetric data to produce a definitive map of the world’s ocean floor by 2030 and make it available to all.
Hydrography and bathymetry solutions typically use a host of differing technologies to achieve the required results. Much of this is to do where the survey is being carried out, depth of water and if the survey can be carried out from the surface using a towfish, or a variety of underwater vehicles, such as autonomous underwater vehicles (AUV) and remotely operated vehicles (ROV). Accurate georeferencing of the seabed to absolute position is critical in any surveying application, however, due to underwater being fully denied of GNSS signals and the use of magnetic heading often difficult, different navigation technologies may be required, such as Boreas fibre-optic gyroscopes and high performance Subsonus USBL systems.
Diver Tracking
Diver safety is of critical importance. Operations need to know where divers are and be able to communicate with them in some way. This can assist in ensuring that divers remain in designated areas, particularly in low to no-visibility applications and that their locations can be verified.
Improved technology that can benefit diver tracking applications are available with Subsonus USBL and Subsonus Tag transponders. Smart features that enhance communication are continuously being developed that make the divers safer, enable better coordination within dive teams, and improve operational efficiency.
Offshore Oil & Gas Pipeline Inspection
Offshore oil and gas energy industries rely on a great many marine and underwater technologies. High grade seabed survey and geological research to accurately determine gas and oil field location, placement of drill sites, rig installation, pipeline laying, and port facilities are some obvious examples.
The harshness of the marine environment means that constant vigilance is required to ensure ongoing safety. Moorings and rig infrastructure and pipelines need constant inspection to ensure that preventative maintenance is timely and that environmental impacts are minimized.
Much attention in energy sectors is focussing on green energies and this is placing additional pressure on the fossil fuel energy sectors to be more efficient, be more effective against environmental damage and more responsive. This means adopting the latest technologies in underwater sensing, survey, inspection, navigation and autonomous vehicles and systems.
Offshore Wind Turbine Inspections
The green energy sector and markets are increasing in importance to the point where they are competing with oil and gas in some regions. Using wind to drive electric turbines is popular in marine based wind turbine applications due to the almost constant wind that is available.
Typically, wind farms are spread across expanses of ocean. Inspections of turbine footings and interconnecting infrastructure are frequently performed major tasks that are extremely well suited to resident autonomous robotic applications, such as Hydrus.
Recommended Solutions
Subsonus Tag
Acoustic positioning transponder

Position Accuracy
0.25 m
Range
1,000 m
Depth Rating
2,000 m
Battery Life
18 months
Subsonus
Next-generation USBL/Modem

Position Accuracy
0.1 m
Roll & Pitch
0.1 °
Acoustic Heading
0.3 °
Range & Depth
1,000 m
Hydrus
Revolutionary underwater vehicle
Depth Rating
300 m
Video Resolution
4K @ 60 FPS
Range
2 km
Endurance
3 hrs
Boreas D70 & D90
World-first digital FOG technology

D70
D90
Roll & Pitch
0.01 °
0.005 °
Heading
0.1 ° seclat
0.01 ° seclat
Bias Instability
0.01 °/hr
0.001 °/hr
Position Accuracy
10 mm
10 mm
Boreas A50 & D50
Most compact FOG INS

Horizontal Position Accuracy (GNSS RTK)
0.01 m
Roll & Pitch Accuracy
0.03 °
Heading Accuracy (Gyrocompass)
0.5 ° seclat
Certus Evo
Ultra-high accuracy MEMS INS

Roll & Pitch
0.03 °
Heading (GNSS)
0.05 °
Bias Instability
0.2 °/hr
Position Accuracy
10 mm
Accurate Positioning in the Most Demanding Conditions
High Performance
Our systems deliver the highest performance and richest feature set on the market. Our high-performance navigational systems are designed to industry standards, ensuring reliability and efficiency across diverse applications.
Trusted Reliability
All our systems are designed and tested to safety standards with fault tolerance built in to provide you with the highest reliability possible. Our reliability is trusted by many of the world’s largest companies.
Quality
Our systems are built to the highest quality standards in Australia to endure the test of time in the most difficult conditions. You can rely on our products.
The Latest News in Subsea Navigation
Advanced Navigation Appoints Chief Technology Officer to Drive Breakthroughs in Deep-Tech Autonomy
1 February 2026
Go to Article
Hydrus featured on CBS Climate Watch
27 June 2025
View Full Media
Hydrus featured on ABC News America
8 June 2025
View Full Media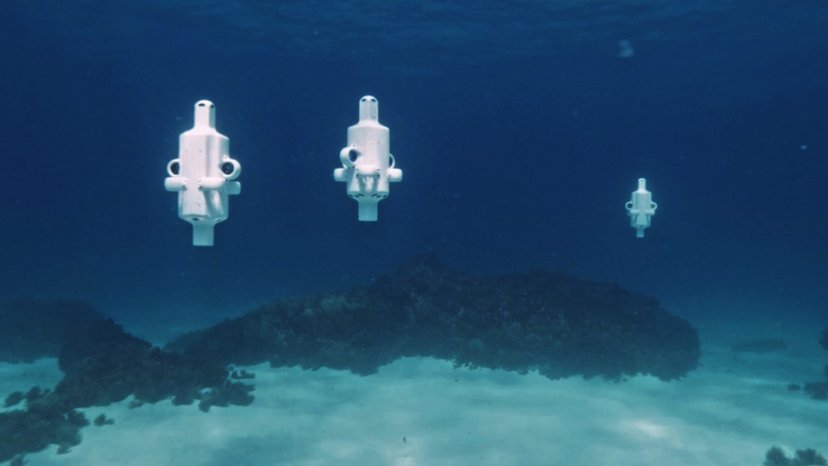
Underwater robot exposes lifeless coral off North Fremantle coast
6 June 2025
View Full Media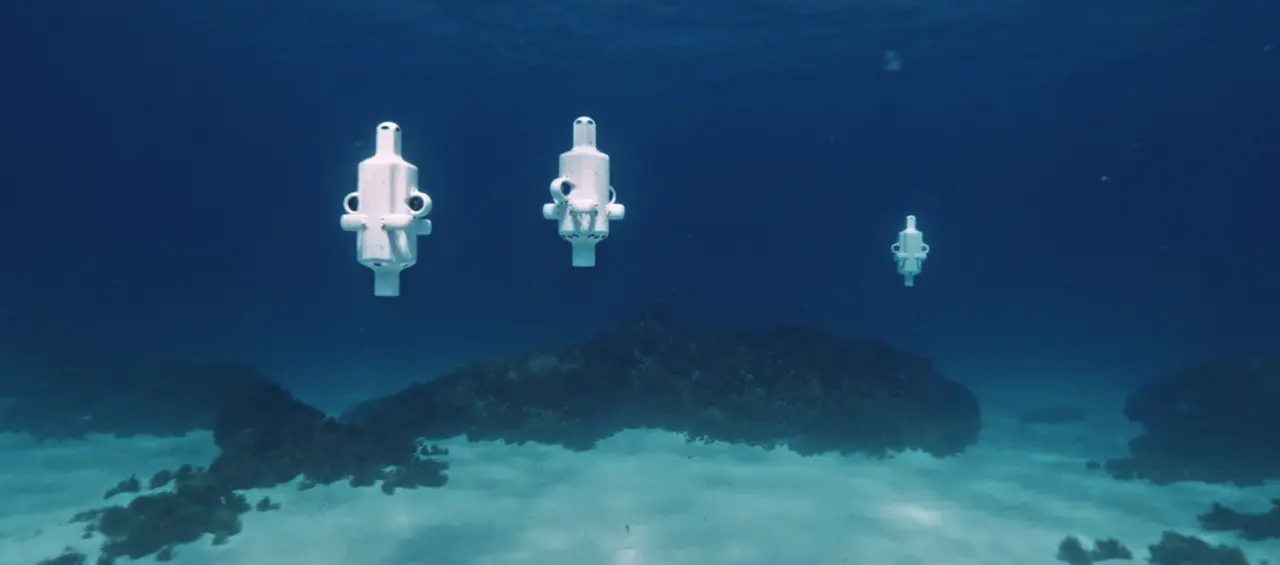
Micro Hovering AUV, Hydrus, Exposes Coral Loss at One of the World’s Southernmost Reefs
3 June 2025
Go to Article
3D mapping underwater drone reveals alarming coral reef degradation
30 May 2025
View Full MediaCommon Questions about Subsea Navigation & Robotics Applications
What are the current challenges facing commercial subsea operators?
Mounting pressure from multiple sectors in response to climate change and the need for increased conservation is dramatically altering the way that we interact with the oceans. There is a major push towards reducing vessel size and crew numbers at sea and to accelerate operations so that off-shore time is minimized. This is being driven by not only third-party clients of subsea services, but operators themselves to reduce costs and carbon emissions.
Emerging technologies for autonomous water-based vehicles are driving a new approach to off-shore surveys, inspection and data collection. Small-scale electrically powered AUV and UAV are delivering massive reductions in vessel costs and traditional diesel engine emissions through super-fast deployment, superior mobility and speed. The adoption of complex AI and high-performance navigation systems and other sensing technologies in conjunction with these vehicles is providing greater scope for subsea operations without the previous massive capital expenditure, required skill sets and logistics.
What are some of the benefits of adopting autonomous underwater navigation systems?
The benefits of autonomous and uncrewed water vehicles are huge. These vehicles require no equipment for human operators, which allows them to be incredibly small and very much bespoke to the intended tasks. Smaller, lighter and less complex equipment is easier to manufacture, uses fewer resources and is more affordable to operate and maintain.
Autonomous and semi-autonomous vehicles are not only reducing capital expenditure in subsea services, but revolutionizing it. The future includes, for example, robotic vehicles in the offshore field that can autonomously make informed AI based decisions. The effects are noticeable drops in carbon emissions, significant improvements in efficiency, and reduced time-to-mission. These heavily reduce costs for crew, vessels and ancillaries, and provide the ability to more frequently carry out survey and data acquisition missions.
How can underwater navigation be improved? What are the advantages of USBL2 (“USBL-squared”) in marine and underwater navigation?
USBL2 uses a transducer on both the subsea asset (ROV, AUV) and the surface vessel. This enables using a shared algorithm and performing USBL calculations at both ends, which produces significant gains in accuracy and reduces measurement uncertainty. Each Subsonus transducer has an INS, which enables full orientation and heading to be calculated and resolved between both the vehicle and surface vessel. USBL2 provides improved accuracy and levels of performance with absolute heading and position being transferred acoustically between the transducers.
USBL2 is a highly effective and complication-free solution for applications that require very high acoustic navigation performance. USBL2 provides reliable absolute position and heading for assets via acoustically transferred GNSS data between the Subsonus units. Obtaining absolute subsea heading data in this way is extremely cost-effective when compared to more complex and expensive alternatives, such as fibre-optic gyroscope (FOG), and is also immune to magnetic interference.
How can I improve the efficiency of regular off-shore underwater inspections?
An ideal solution is to adopt autonomous underwater robotic drones that can remain resident to the inspection area and can repeat missions without intervention. Hydrus is such a system. It can be programmed as a mission that it repeats at predefined intervals; for example, inspecting a port seabed for shipping lane obstructions or for dredging. On mission completion, the captured data is uploaded automatically while the Hydrus docks and recharges.
Perhaps more critically, Hydrus can carry payload software that can leverage the robot AI and enable it to capture very specific information. For example, to identify corrosion in equipment moorings, cracking or movement of concrete footings, dam wall inspections, detect objects of type (shape and size), and monitoring changes in marine habitat, such as water composition and coral growth or decline.
Using such a system can very significantly reduce costs for not only capital expenditure but in crewing, divers, insurance, consumables (vessels and crew) and time to mission.
What does an autonomous underwater vehicle use as a subsea navigation system?
There will typically be several navigation systems and technologies used in an AUV navigation system. For example, a means of establishing position may be required. For absolute position, this often means a USBL with GNSS input that can transmit bearing data to the AUV. An INS may be used in continued navigation, in a dead-reckoning sense, to estimate position based on its inertial sensor inputs, with reference to the last known absolute position or previous estimated position. Acoustics systems, such as sonar and DVL (Doppler velocity log), can be used to improve positioning accuracy by providing additional motion data based on the Doppler shift in sound signals bounced off the seabed. This data is another input to the INS signal processing that introduces additional velocity information, the speed and direction of currents, and vehicle orientation and heading.
Depth in open water is often determined by pressure sensors. Input data from the sensors are fed into an algorithm that applies filtering of the data and introduces additional variables, such as water temperature and salinity, and INS data to provide greater accuracy. For altitude from the seabed, acoustic DVL may be used. This system emits acoustic signals that bounce off objects. The returned signals are processed and, using time over distance and velocity of sound in water, can determine distance from the seabed.