
How is AI Revolutionising Inertial Navigation?
Share:
Published on:
Since its inception in the 1960s, the Kalman filter has been commonly used to this day for guidance and navigation applications. It has undergone many adjustments designed to improve upon the basic implementation, such as the extended and unscented Kalman filter. In recent years, however, a new approach to filtering based on artificial neural network (ANN) processing has made significant breakthroughs that have pushed the inertial navigation industry into a new era.
Up until recently, little has been concretely achieved in the space of artificial intelligence (AI) for inertial navigation applications, until Advanced Navigation began commercializing a fusion neural network from university research in 2012.
The stakes have been further raised with the widespread use of GNSS jamming and spoofing technologies. This is forcing defense organizations to move away from GNSS-only solutions for position information and, instead, adopt inertial navigation systems (INS) solutions that can provide the necessary precision and reliable dead-reckoning performance.
How does an Artificial Neural Network (ANN) Work?
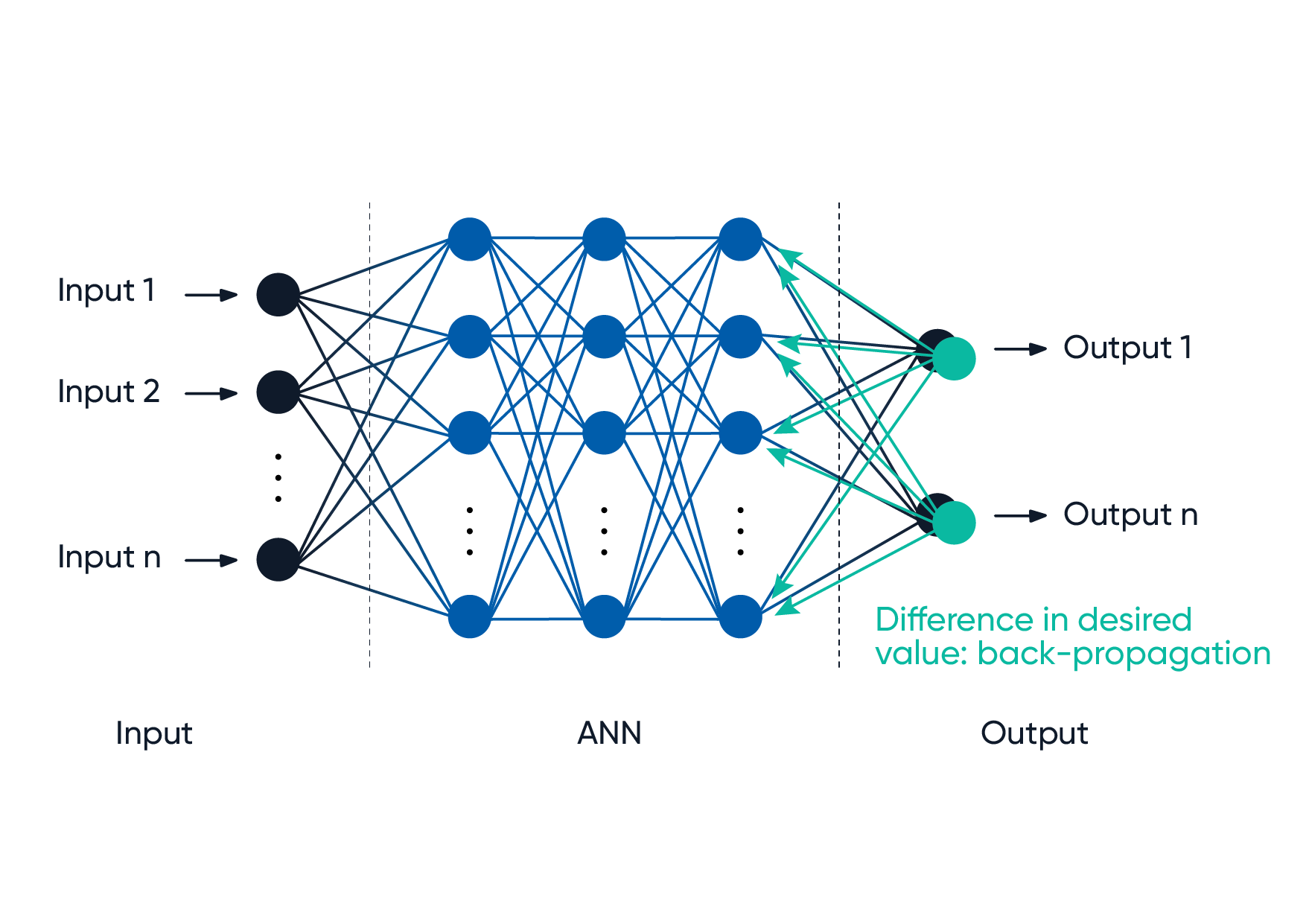
At its core, an artificial neural network has self-learning capabilities that enable it to convert inputs from various sensors into better resulting outputs as more data becomes available, over time. More precisely, a typical ANN goes through two distinct phases.
- An initial phase, where processing units making up the ANN are “taught” a set of learning rules used to guide outcomes, recognize patterns in data by comparing actual output produced with the desired output.
- A second phase, where corrections (referred to as back-propagation) are applied to the actual data to achieve the desired output.
Advanced Navigation’s solution uses the long short-term memory (LSTM) AI principle, which is well-suited to classifying, processing and making predictions based on sensor data with a variable duration between important events.
As LSTM operates over a long timespan, it is relatively insensitive to gap length as an advantage over the hidden Markov model generally associated with Kalman filters.
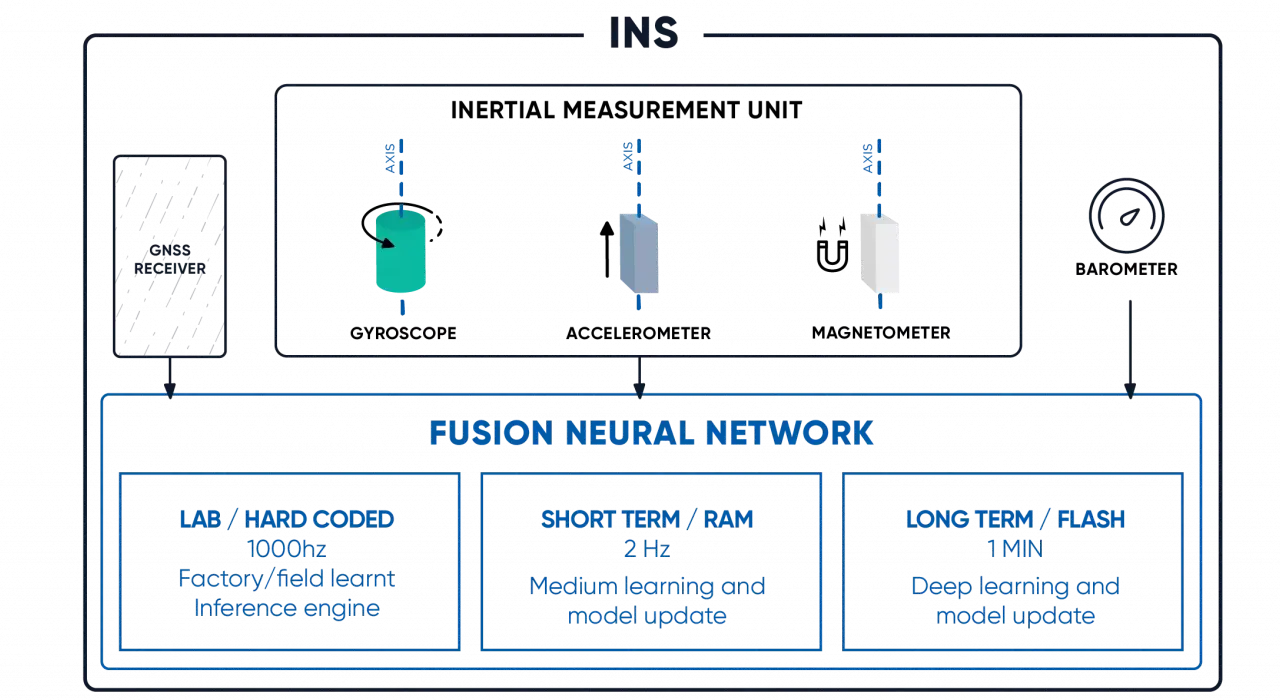
Advanced Navigation’s ANN relies on three types of memory:
- In the lab, long-term learning is hardcoded in the inference engine, based on many hours of testing in various environments.
- In the field, short-term learning operates to update the model in the inference engine twice per second. This learning is more constrained and offers what we call “medium level learning”.
- Once per minute “deep learning” operates across all sensor data, to self-model the system in order to make the most complex updates to the learned model.
Comparing Traditional Filtering and ANN
Common errors that are addressed using filtering during sensor input processing are of two kinds:
- Deterministic errors – these include biases, scale-factor errors, and non-orthogonal errors
- Stochastic errors – these include instabilities and signal noise
Temperature calibration of sensors is able to account for a large proportion of errors, however, live sensor error estimation is required to account for remaining errors and is critical to the accuracy of the system.
With a number of sensor inputs into any INS, it is expected that a reasonable amount of filtering, computation, and integration is required to continuously determine current position, orientation and velocity.
Traditional filters face limitations in correcting these errors, opening the door for ANN solutions to fill the gap.
Traditional and extended Kalman filters track sensor errors with what may be referred to as a delay of sorts due to being constrained by linear approximations, based on what has just occurred and what is occurring now. The advantage of the ANN filter is that the sensor error tracking is significantly more accurate due to its use of all the data available, making it able to better and more quickly estimate errors.
Firstly, the ANN filter features integrity monitoring that is far superior to traditional filters, allowing it to reject erroneous measurements and adjust accuracies for inconsistent data at a much deeper level. This gives the system far greater performance in difficult conditions, where larger volumes of erroneous data are typically more prevalent. Performance increases are especially noticeable in multi-path (reflected signals) GNSS conditions, such as urban canyons.
Secondly, with traditional Kalman filter-based systems, linear constraints are applied to position, velocity and acceleration across various sensor inputs for modeling vehicle motion. In contrast, when using ANN, non-linear constraints are applied for a far more thorough, real-world dynamic vehicle motion model, allowing for better tracking of errors, more reliable data, and higher accuracy.
The Advanced Navigation Advantage
In practice, developing a non-linear but tightly constrained AI fusion neural network model is not exactly straightforward.
It has only been achieved through a rigorous process and many years of lab and field research. This began at university in 2007, to develop a highly constrained custom neural network, establish training patterns and building a large collection of data.
Had the AI model not been as constrained through a custom neural network design approach, it would likely lead to unpredictable results and require a higher level of processing. In fact, it may potentially not provide any net benefit over traditional Kalman filtering methods.
As a result of implementing a highly constrained AI learning model, it is possible to develop our INS offerings on high-end microprocessors, which operate at relatively low power.
Furthermore, all Advanced Navigation IMU and INS products operate using a 1000 Hz (1 kHz) internal filter rate to provide high dynamic performance in the most demanding applications.
Advanced Navigation’s breakthrough innovations are available in several IMU and INS solutions that are very competitive in terms of minimal size, weight, and power consumption.
Field Tests
For an example of real-world performance of Advanced Navigation INS solutions, read our Spatial FOG INS field test.
A Promising Future
Artificial neural networks provide a new approach to inertial navigation that deliver significant gains over previous technologies and techniques. Not only, but using AI / ANN helps us continue to develop very high performance products that also offer extremely competitive SWaP-C at each performance level.
Recent Tech Articles
How Improved Positional Accuracy Can Transform Mining Excavation
Explore the new standard in absolute positioning for GNSS-denied environments. See how the Chimera Land LVS and INS pairing anchors real machine motion.
15 June 2026
Go to Article
High-Precision Navigation at Scale for Counter Drone Technology
Unlock precision for your kinetic effector on-the-move. Discover how Advanced Navigation delivers the stabilization and supply chain speed needed for scalable counter drone defense.
18 May 2026
Go to Article
Navigating the Future of Mining Operations
Discover how to improve product quality in manufacturing through Advanced Navigation's rigorous supply chain and exhaustive validation.
5 May 2026
Go to Article