INS Field Test | Spatial FOG
Share:
Published on:
Key Points
- Advanced Navigation conducted an INS field test for Spatial FOG to demonstrate the accuracy of the unit in a real-world scenario.
- Product Tested: Spatial FOG
- Performance Tested: Dead-reckoning / INS
- Location: East Coast, NSW, Australia
- Date: October 2014
Spatial FOG* is an industry-proven GNSS/INS and AHRS. It combines high-accuracy fibre-optic gyroscopes, accelerometers, magnetometers, and a pressure sensor with an RTK GNSS antenna. These are coupled in an AI-based fusion algorithm to deliver accurate and reliable navigation data.
* Note: The Spatial FOG model used in this test has been superseded by a dual GNSS antenna model – Spatial FOG Dual. As the nature of the test is one of inertial navigation dead-reckoning performance (no GNSS), the information presented here applies to both models.
Table of Contents
INS Field Test Environment
Advanced Navigation performs extensive product testing both in the laboratory and in the field. This test report is designed to demonstrate the inertial navigation accuracy of the unit in a real-world scenario. The test is carried out under conditions that are designed to challenge the performance of the unit. This report aims to help facilitate decision-making in the suitability and performance of Spatial FOG products.
Test Conditions
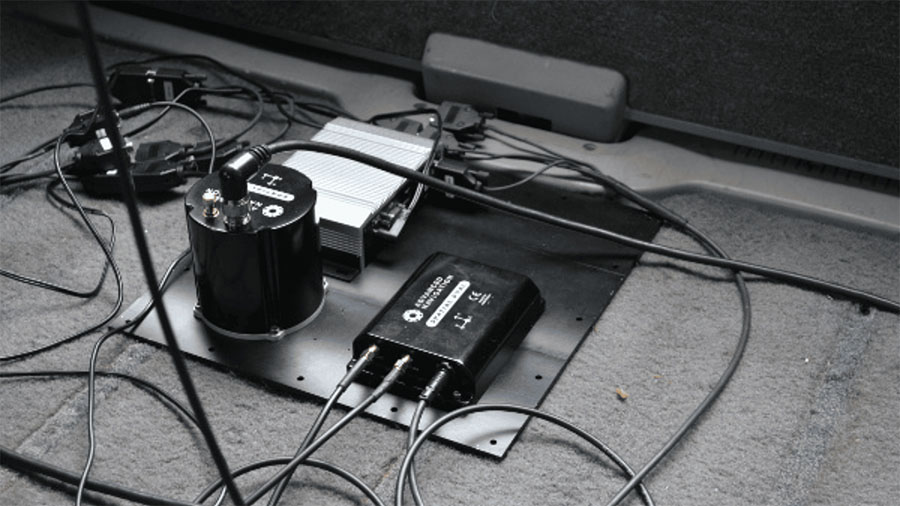
The INS field test was carried out in NSW, Australia. In this test, a car was fitted with:
- Spatial FOG INS
- Spatial Dual MEMS GNSS/INS
- Two GNSS antenna
- Odometer to provide a secondary input into the Spatial FOG.
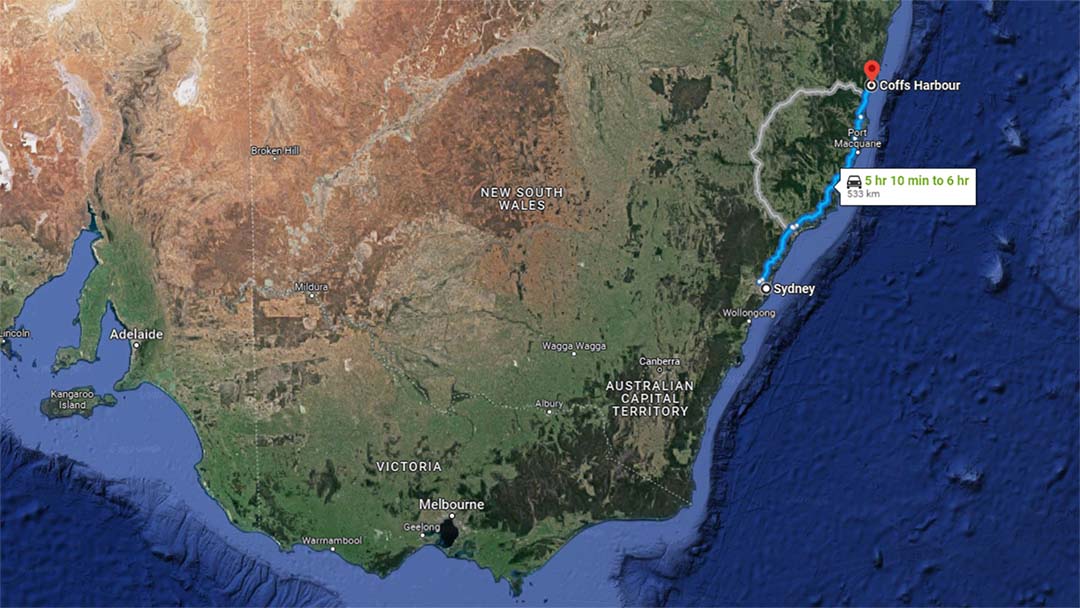
The test was to drive the car along a complex route (not just motorways) and compare position data between the GNSS reference and the Spatial FOG INS at the end of the journey. The 558 km journey included varied terrain, heavily forested regions, elevation changes (800 m) and substantial sections of winding roads. These conditions represent considerable challenges to an INS of any type.
The following steps were taken:
- At the start point of the journey, the Spatial FOG was connected to the GNSS antennas to provide an initial position. The antennas were then disconnected. This means that the device was operating as an INS, aided by the odometer only.
- The GNSS antennas were connected to the Spatial Dual to provide GNSS reference data. RTK was activated to maximize accuracy to <10mm.
- The car was driven the 558 km route (8 hours and 17 minutes duration).
- At the end of the journey, the position data between the GNSS reference and the Spatial FOG was compared.



Field Test Result
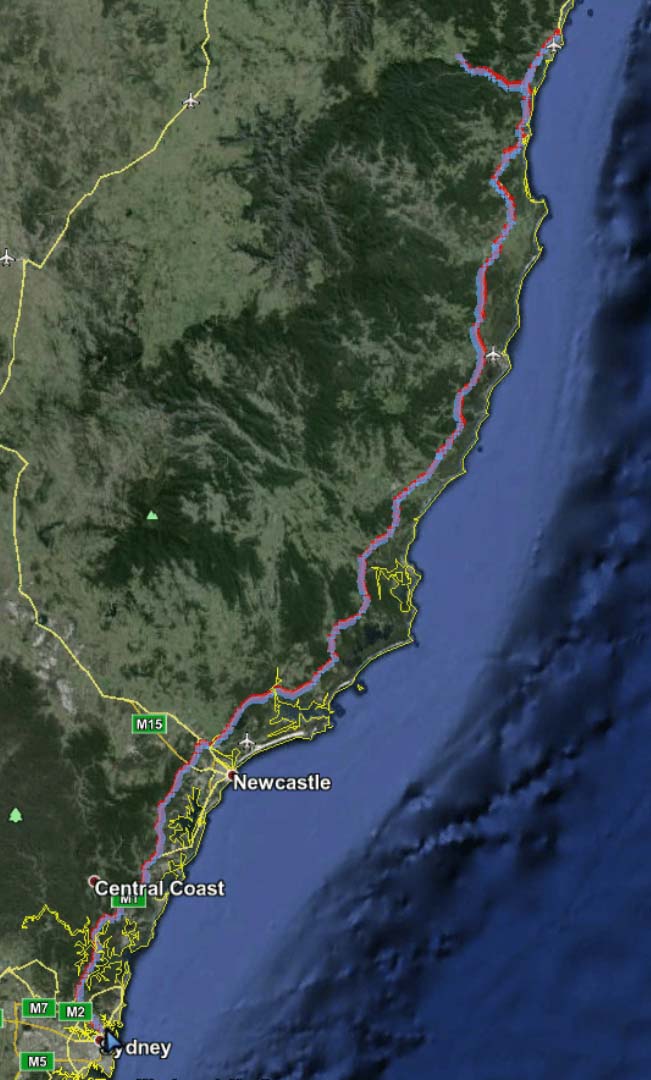
The result was an extremely impressive 0.1% difference in position between the RTK-assisted GNSS reference and the position estimated by the Spatial FOG INS. That is, ~564m over a 558 km distance.

The map above shows the trajectories of the GNSS reference (red line) and the Spatial FOG INS (blue line) during the last few km of the test.

Spatial FOG Dual
Spatial FOG Dual is an industry-proven GNSS/INS and AHRS. It combines high accuracy fibre optic gyroscopes, accelerometers, magnetometers, and a pressure sensor with a dual antenna RTK GNSS receiver. These are coupled in an AI-based fusion algorithm to deliver accurate and reliable navigation data. Spatial FOG Dual is compatible with our post-processing kinematic (PPK) software Kinematica.