IMU & AHRS
High-Performance and Compact Inertial Sensors
Advanced Navigation is a leading manufacturer of high-accuracy MEMS and FOG inertial measurement units (IMU) and attitude and heading reference systems (AHRS). The IMUs combine calibrated high-accuracy accelerometers, gyroscopes, and magnetometers that are put through an intensive 8-hour temperature calibration process. This provides the highest accuracy possible for each sensor class over the full operating temperature range (-40° C to 85° C). A high output rate of 1000 Hz ensures high dynamic performance in the most demanding applications.
The MEMS-based IMU / AHRS range covers industrial and tactical performance grades. For applications requiring higher accuracy, our range of fibre-optic gyroscopes (FOGs) includes IMU and AHRS variants that offer navigation and strategic-grade performance with bias instability as low as 0.001°/hr and roll and pitch accuracy as high as 0.005°.
Thanks to vertical integration, Advanced Navigation has total control over both hardware manufacturing and software design, enabling us to set a new benchmark for accurate and reliable motion sensing and orientation.
Advanced Navigation IMU / AHRS are used by the world’s leading companies for both commercial and defence applications. Our global team of support engineers ensures that our solutions are successfully integrated into your systems.
Our IMU & AHRS
MEMS IMU
Our MEMS-based IMU / AHRS range covers industrial and tactical performance grades. All Advanced Navigation inertial systems use a common communication protocol, enabling customers to extend their product range by moving up or down the accuracy spectrum without incurring re-engineering costs.


Attitude and heading reference system
Roll & Pitch
0.1 °
Heading (Magnetic)
0.8 °
Output Data Rate
500 Hz
View Solution

Ultra-high accuracy MEMS IMU
Roll & Pitch
0.05 °
Heading (Magnetic)
0.8 °
Bias Instability
0.2 °/hr
Update Rate
1000 Hz
View Solution

Rugged and cost-effective IMU
Not recommended for new designs. See next generation Certus Mini A.
Roll & Pitch
0.2 °
Heading (Magnetic)
0.8 °
Bias Instability
3 °/hr
Update Rate
1000 Hz
View Solution
FOG IMU
Our range of fibre-optic gyroscope (FOG) IMU/AHRS solutions provides navigation and strategic-grade accuracy and ultra-fast north-seeking with no reliance on GNSS.

Ultra-high performance FOG IMU/AHRS
A70
A90
Roll & Pitch
0.01 °
0.005 °
Heading
0.1 ° seclat
0.01 ° seclat
Bias Instability
0.01 °/hr
0.001 °/hr
Output Rate
1000 Hz
1000 Hz
View Solution
The Latest News, Articles & More

Europe Expansion with High-Profile Military Appointment
16 June 2026
Go to ArticleHow Improved Positional Accuracy Can Transform Mining Excavation
15 June 2026
Go to Article
High-Precision Navigation at Scale for Counter Drone Technology
18 May 2026
Go to Article
Navigating the Future of Mining Operations
5 May 2026
Go to Article
How Advanced Navigation’s Manufacturing Ensures Consistent Product Quality
27 April 2026
Go to Article
How a Compact North Seeking Gyro Delivers Precision Underground
16 April 2026
Go to ArticleCommon Questions about Attitude and Heading Reference Systems & Inertial Measurement Units
What is an Attitude and Heading Reference System (AHRS)?
AHRS stands for Attitude and Heading Reference System. Attitude refers to an object’s orientation relative to the horizontal plane that is parallel to the horizon. This is often described as pitch and roll.
Heading is the direction a vessel is pointing towards relative to True North.
An AHRS is often used in aircraft and can also be used as a navigation aid for ground-based robots. Other uses for AHRS include measuring human movement by sports scientists.
How does an AHRS work?
An AHRS is comprised of IMUs (inertial measurement unit) on three orthogonal axes (commonly referred to as X, Y and Z). Typically these IMUs contain:
- Accelerometers
- Gyroscopes
- Magnetometers
Accelerometers measure the linear force acting on the vehicle. This includes gravity, which is used to determine the orientation of the vehicle with respect to the centre of the Earth.
Gyroscopes measure the rotational force acting on the vehicle.
Magnetometers measure magnetic fields. If the position of the vehicle is known, the vehicle heading relative to magnetic north can be determined. Heading relative to True North can also be found due to the known declination value.
Additional sensors can be incorporated to assist an AHRS. A common addition is the use of a dual antenna GNSS receiver (global navigation satellite system). By using two GNSS antennas the vehicle heading can be determined to a much higher accuracy.
If minimal SWaP-C is not required, higher accuracy gyroscopes based on fibre optic technologies (FOG) can dramatically increase attitude and heading accuracy.
Why use heading reference systems?
AHRS are often made from micro-electromechanical systems, or MEMS. Therefore the compact and lightweight nature of an AHRS allows it to be used in vessels that require a small SWaP-C (size, weight, power and cost).
This small SWaP-C makes AHRS ideal for unmanned aerial vehicles (UAV) which need accurate measurements but can’t carry an instrument that is heavy or bulky.
Typically an AHRS is used for:
- Surveying
- Autonomous manufacturing robots
- Underwater navigation
- Surface marine navigation
- Tracking human movement for sports science
What is the difference between an Inertial Navigation System (INS), Attitude & Heading Reference System (AHRS) and Inertial Measurement Unit (IMU)?
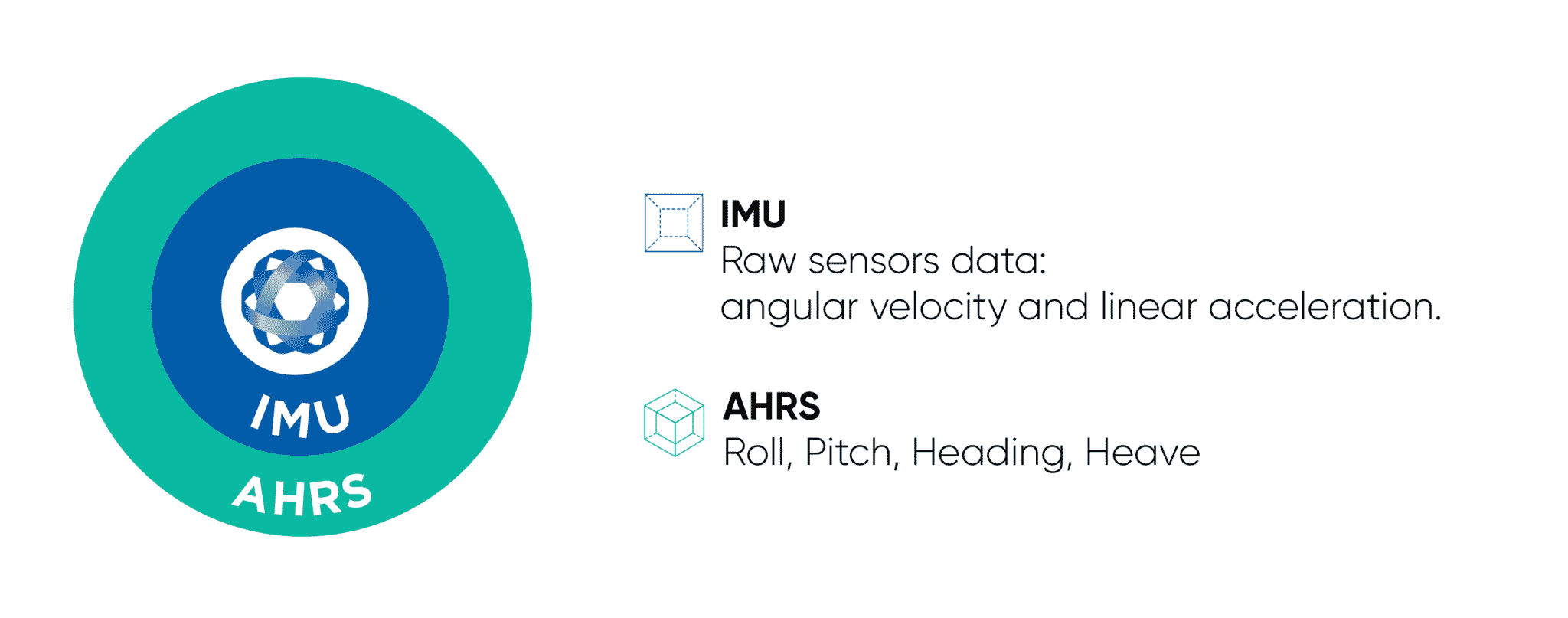
The output of an IMU is raw sensor data from the accelerometer (linear acceleration), gyroscope (rotational rates) and optionally a magnetometer (magnetic heading).
This information can be used for measuring the motion of an object in 3 dimensions (for example, am I pointing up and how fast am I spinning). An attitude heading and reference system (AHRS) contains an IMU, however, it also has onboard processing that applies filtering/sensor fusion to the IMU data to accurately determine the orientation (represented as roll, pitch and heading/yaw), velocity and relative position.
An AHRS coupled with a global navigation satellite system (GNSS) that provides absolute position and velocity information is referred to as an inertial navigation system (INS). An INS fuses AHRS and GNSS information to provide a very reliable representation of a system’s absolute position, orientation and velocity.