
How a New Underground Positioning System Could Fix the Ore Reconciliation Puzzle
Share:
Published on:
Article Summary
The Challenge: Unreliable underground positioning systems prevent accurate vehicle, and therefore ore, tracking within the mine. This makes a multitude of reconciliation tasks more difficult and less efficient, leading to significant loss of opportunities.
The Solution: Advanced Navigation’s Laser Velocity Sensor (LVS) enables robust underground positioning and location data by overcoming common system failures associated with vehicle odometry, such as wheel slip and poor visibility.
The Outcome: Unambiguous ore and vehicle tracking, improved reconciliation, proactive maintenance planning, and optimized fleet management, for a more profitable mine, without compromising safety.
Your central challenge, beyond extraction, is one of knowledge: achieving high certainty about which stope or draw point every tonne of ore came from, and where it went. This starts with knowing the movement of every loader and which haul truck it interacted with.
This is the bedrock of effective ore grade control, production reconciliation, and mine planning.
This critical process over the years has been undermined by the limitations of underground positioning, or lack thereof, and/or the reliance on fixed infrastructure, which does not exist in the development areas.
Furthermore, the performance requirements for utilizing an inertial navigation system (INS) effectively meant that an ultra-high performance, ITAR-controlled, imported military-grade system was necessary. However, even these top-tier solutions are heavily limited by odometry (or similar speed inputs) for practical navigation or machine guidance. Conventional odometry such as wheel or drive-shaft encoders are still limited by wheel slip of between 2-10%, and many perception odometry systems suffer from ambiguities and geometries within the environment. Therefore, even if the aforementioned military-grade INS was installed on a haul truck, the overall performance would still be hampered by the error in odometry (and over 1.5 kilometers, the worst case scenario for this hypothetical could equate to 150 meters). This is simply made worse when more cost-effective solutions are deployed.
Therefore, regardless of the vehicle, or the level of raw hardware performance, INS-based navigation has not been able to meet the price-to-performance ratio necessary for widespread adoption in the underground. For those sites that can, fixed infrastructure has been rolled out, or more commonly, supervisors, mine operators and maintenance managers accept that they will be blind of what their vehicles are doing throughout the shift.
Until now.
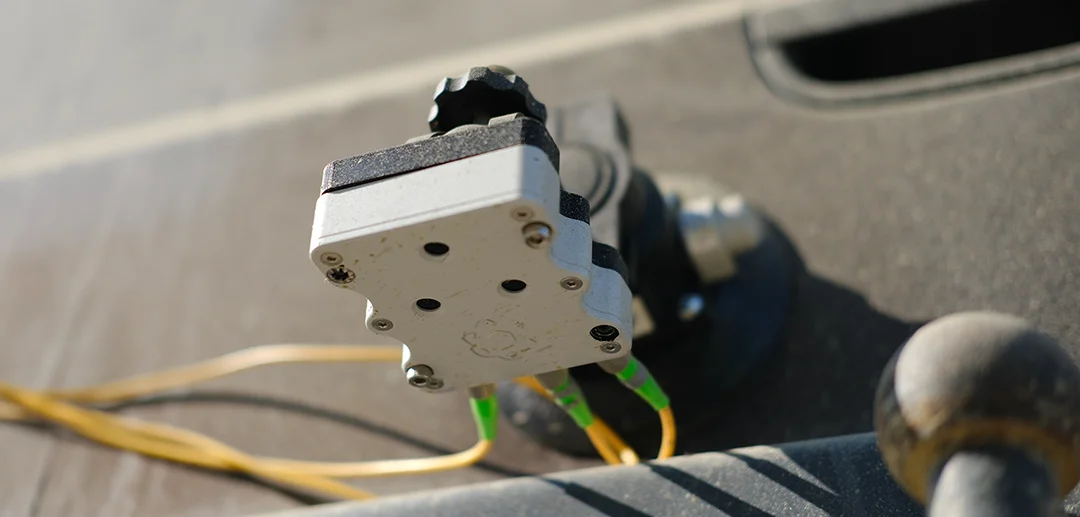
Advanced Navigation’s Chimera Land Laser Velocity Sensor (LVS) introduces a fundamental change by injecting near-perfect, three-dimensional vehicle velocities directly into the heart of the INS, the result is a superior, high performance underground positioning system, capable of operating in development areas, at a more accessible price point.
This INS + LVS pairing provides a highly reliable, time-stamped digital record of vehicle position, which can then be used to create a digital chain of custody for every tonne of material moved.
Learn more about the Chimera Land Laser Velocity Sensor (LVS)
Engineered for extreme environments to deliver exceptional long-duration dead reckoning accuracy.
Visit the Product Page

The High Cost of the Data Gap
Think about the cost to your operation of processing just one haul truck of waste rock that you mistakenly thought was high-grade ore. Now, what if that was happening more frequently than you know or are aware of?
This is the hidden ‘data gap’ tax you are paying every single day, and it is where inefficiency turns into significant financial loss.
When the loader emerges with a bucket of ore to meet the haul-truck, you need to know:
- Did that material come from the high-grade Stope A, or were the dregs near the hanging wall from Stope B next door, accidentally collected?
- When a hauler dumps a load, was it at the correct stock pile or crusher for the grade it was carrying?
Relying on a conventional underground positioning system makes answering these questions an exercise in educated guesswork. This is mostly because the data does not exist or is simply not reliable enough to disambiguate locations that are in close proximity. This uncertainty leads to several critical issues:
- Delayed reconciliation: At the end of a shift, when the tonnage and grade don’t match projections, it’s difficult to pinpoint the source of the discrepancy.
- Reactive planning: Planners are forced to make decisions based on lagging, often inaccurate information. By the time a problem is identified, it can be difficult to truly determine how significant the issue was (deviations from the plan), or how much re-work is required.
- Opaque operations: Without a reliable log of vehicle movement, it’s difficult to analyze and optimize fleet performance, or quickly identify conditions that are leading to increased wear and tear. Furthermore, a bottleneck on a certain haulage route might go unnoticed, or the root cause of a vehicle breakdown might be misidentified.
The challenge is clear: an underground positioning system is needed that can provide a reliable stream of time-stamped, unambiguous positional data in areas where fixed infrastructure is impractical and other sensors fail.
Building a Digital Chain of Custody

Advanced Navigation’s hybrid INS + LVS system is engineered to provide this foundational data layer to your existing telemetry or fleet management systems. It operates on a principle of directly measuring the Doppler shift of at least three lasers, which are aligned such that the vehicle’s true velocity, in all three dimensions, are measured with extreme accuracy. This method is completely independent of the drivetrain, making it immune to wheel slip, side slip, and vertical motion. Although LVS also resists the effects of dust and buildup, the laser head has been specifically designed to IP69K, thus allowing it to be a targeted item during your daily washdown routine. Without high data availability, building an unambiguous chain of custody is not possible.
The power of an INS + LVS in this context is not just its real-time accuracy, since there may not be data link available to report this position immediately, but the high-fidelity historical log it creates. This continuous stream of the time-stamped, 3D vehicle position could be uploaded several times per shift, becoming the backbone of a digital chain of custody.
- For loaders: The system can log exactly which stope it came from, through to where it loaded the hauler.
- For haulers: The system tracks the truck’s complete journey from being loaded, and by which machine, to exactly where it dumped the material.
This digital handshake, from stope to loader, from loader to truck, from truck to destination, disambiguates material movement in areas where it was previously difficult to do so with any degree of certainty.
From Theory to Reality
Claims of technological breakthroughs are common, but for the mining industry, performance is only proven in real-world applications.
To provide this definitive proof, Advanced Navigation’s technology was demonstrated in a real underground mine as part of the BHP Deep Mining Challenge.
The testing ground was the Callio Mine in Pyhäsalmi, Finland. At 1,440 meters, it is one of Europe’s deepest hard rock mines, presenting a challenge for any navigation technology.
The goal was to demonstrate that a vehicle could navigate with high precision without any external infrastructure—no Wi-Fi, no beacons, and certainly no GNSS. Advanced Navigation fused its new Laser Velocity Sensor with Boreas D90, a strategic grade FOG-based INS, to prove that the technology could provide a reliable stream of positioning data within the underground environment.
The results from these deep-mine trials were a new benchmark for what is possible with vehicle-based, infrastructure independent underground navigation.
The system delivered:
- Position accuracy within 0.55 metres over 6km. This is the headline figure that directly enables a reliable digital chain of custody. This level of accuracy means you know not just which draw point an LHD loaded from, but which specific part of the face. It’s the difference between a rough estimate and a verifiable fact.
- Heading accuracy well below 0.1 degrees. Despite the high latitude in Finland (63°, reducing heading performance by 220%), the hybrid INS + LVS system provided excellent directionality, ensuring the vehicle’s path was tracked without “navigational creep,” which is critical for both mapping and autonomous vehicle navigation.
- Roll/pitch accuracy of 0.01 degrees. While seemingly a minor detail, this level of accuracy provides a highly detailed picture of the vehicle’s attitude as it interacts with the varying road surface. This data is not only critical for navigation, but has the potential for generating detailed road condition reports, flagging areas that need maintenance before premature wear occurs on tyres, suspension, or drivetrain components. This has a direct impact on safety and fleet operational costs.
Transforming Data into Operational Intelligence
Having this location history, validated by real-world performance, provides a level of oversight that has the potential to transform operations from reactive to proactive.
Data-Driven Reconciliation and Grade Control
Planners can now precisely link ore quality back to the specific draw points they originated from. This further helps ensure production goes to plan and assists with identifying operational errors (while improved planning helps reduce error frequency to begin with). This operational feedback loop may also assist with additional functions, such improved predictive maintenance and geological modeling.
A New Standard for Underground Mining Safety
Knowing the exact location of every piece of heavy machinery at all times could also become the basis for advancing Collision Avoidance Systems (CAS). The INS + LVS provides the high-fidelity, low-latency position and velocity data these systems need to operate effectively, and combined with advanced communication technologies, this opens the door to multiple vehicles being capable of autonomously negotiating intersections or areas with limited line of sight.
Furthermore, this data could allow for dynamic geofencing, creating virtual exclusion zones around personnel or sensitive areas that can trigger alerts or even vehicle interventions if breached, with fewer false positives than current solutions.
From Motion Tracking to Material Intelligence
The evolution of vehicle odometry in hard rock mining is moving beyond simply trying to correct for sensor drift. This new frontier is about a multiplicative leveraging of near-perfect, three-dimensional velocity information to not just claw-back this position drift, but to access a level of INS performance that even with perfect wheel odometry is currently not achievable.
In other words, while conventional and perception-based odometry systems struggle to provide reliable data in the most critical production zones, Advanced Navigation’s hybrid INS + LVS system delivers with reliable consistency, as shown in the depths of the Callio Mine.
Our INS + LVS provides the foundational data layer necessary to optimize reconciliation, sharpen planning, enhance underground mining safety, and opens the door to a new level of efficiency in fleet management for underground mining.
Furthermore, if we look to the future, such a consistently low-drift positioning system closes the data gap, replacing assumptions with accuracy, and potentially allowing the development of next-generation autonomous solutions sooner than what might otherwise be possible.
Contact our mining experts today to learn how the LVS can be integrated into your fleet to deliver a verifiable digital haulage record for your mine.
22 km Traversed at 1400m Depth. Sub-0.1% Error Rate.
See how our Fiber-Optic Gyroscope Inertial Navigation System combined with our Chimera Land Laser Velocity Sensor demonstrated long-range navigational accuracy in Europe’s deepest underground mine.
See the Trial Results
FAQs
What is a ‘digital chain of custody’ in the context of underground mining, and how does LVS enable it?
A “digital chain of custody” refers to a verifiable, time-stamped digital record that tracks the precise movement of vehicles, and therefore material, from its origin to its destination. The LVS not only enables the INS to reach its full potential, but beyond what was previously thought possible with perfect odometry.
How does precise vehicle positioning data from the LVS improve ore reconciliation and grade control?
With significant improvement to ore body intelligence, the precise, time-stamped location history provided by the hybrid INS + LVS system can be used by mine managers or supervisors to accurately link ore grades back to their specific draw points. This reduces location ambiguities, helping ensure production aligns with the plan.
What are the benefits of the LVS for underground mining safety?
For underground mining safety, knowing the exact, real-time location of every piece of heavy machinery is fundamental for advanced Collision Avoidance Systems (CAS). The INS + LVS provides the high-fidelity, low-latency data, which is a fundamental layer or requirement for the next generation of proactive collision avoidance.
Recent Tech Articles
How Improved Positional Accuracy Can Transform Mining Excavation
Explore the new standard in absolute positioning for GNSS-denied environments. See how the Chimera Land LVS and INS pairing anchors real machine motion.
15 June 2026
Go to Article
High-Precision Navigation at Scale for Counter Drone Technology
Unlock precision for your kinetic effector on-the-move. Discover how Advanced Navigation delivers the stabilization and supply chain speed needed for scalable counter drone defense.
18 May 2026
Go to Article