
Pedestrian Dead-Reckoning (PDR) – An Introduction
Share:
Published on:
Table of Contents
- Intro
- How Does Pedestrian Dead-Reckoning Differ From Vehicle Mounted Inertial Navigation Systems?
- Where Can Pedestrian Dead-Reckoning be Used?
Intro
Dead-reckoning is the term given to approximate one’s current position based on estimated movements from a previously known location. That is, having your starting point coordinates, then estimating heading (direction) and distance travelled between each change in direction, using velocity and time, to calculate where you are now.
Imagine that you are driving a car and using a GNSS satellite navigation system then enter a tunnel with curves and straight sections that emerges into a street that is closely bordered by tall buildings. In this imaginary scenario, your navigation system loses GNSS signals when entering the tunnel and upon leaving the tunnel, GNSS is blocked or reflected off the buildings so you still do not have an absolute position fix. So, where are you? If your car sat-nav is also an inertial navigation system (INS), it can give you an idea of your position based on your car’s dead-reckoned motion through the tunnel and out into the street.
A modern INS will typically use an inertial measurement unit (IMU) that contains accelerometers that can detect small changes in acceleration, a gyroscope to detect rotation, a magnetometer to determine direction based on sensing the Earth’s magnetic field strength for finding North, and a barometric pressure sensor to determine altitude. The INS uses the sensor data to dead-reckon position in three dimensions (X, Y and Z) from the last known fix.
If we remove the vehicle from the above scenario and, instead, place the navigation system on your person, then we are now “pedestrian dead-reckoning”. You may be familiar with a pedometer that you wear that counts steps and can calculate distance walked based on a conceptual stride length. A pedometer uses a simple calculation of multiplying stride length by the number of steps counted to provide an estimated distance travelled. What is missing, however, is any notion of position or route travelled. This is where PDR will be able to help in determining your coordinate position.
How Does Pedestrian Dead-Reckoning Differ From Vehicle Mounted Inertial Navigation Systems?
Fundamentally, a pedestrian dead-reckoning (PDR) device and an INS use the same motion sensing technologies, however, the “mechanics” of how a vehicle moves and how a person moves are very different. Unlike a typical strap-down inertial navigation system that is fixed to a vehicle and geometrically aligned with the axis of forward motion, the location of a PDR device is somewhat arbitrary and prone to shifting. It could also be said that human movement is considerably more erratic, instantaneous or inconsistent than that of a typical vehicle and this makes accurate pedestrian dead-reckoning a challenging proposition.
Human Motion Biomechanics and Estimating Movement
As a background, gait analysis and the study of human and animal locomotion is of interest in several fields of scientific and engineering. The study and modeling of bipedal locomotion and other human motion (arms and hands) is primarily driven by humanoid robotics research to mimic various levels of human movement. The future of this may be to use such robots and robotic prosthetics to assist people in various tasks using the same tools and equipment that people do; the classic example being the robot butler or cleaner. PDR may be thought of as an off-shoot of bipedal locomotion research, with a range of uses outside that of robotics.
All of us have peculiarities to our motion; for example, gait, fluidity of movement, and stride length consistency amongst many factors. A few basic constructs are required as a starting point for determining movement trajectory and these are at least the ability to reliably detect a step being taken, a reasonable estimation of stride length, the direction in which the step is being taken, and the orientation of the PDR device on the person.

People walk in many different ways and this can presents significant challenges in developing reliable and accurate pedestrian dead-reckoning systems
People do not walk at the same pace all the time. Increased and decreased walking speed needs to be detected, as would be jogging or running and movement over different surfaces. Traveling up and down stairs, carrying loads, using elevators and escalators, for instance, are a few of many additional complexities that a PDR device needs to detect and compensate for.
Sensor Fusion and Pedestrian Dead-Reckoning Algorithms
As per the norm for current day inertial navigation systems, the fusion of motion sensor data is critical to dead-reckoning performance and accuracy. Sensor fusion uses algorithms to combine and constrain raw sensor data in rational ways that equates to a reasonable record of motion. Note that motion sensors are not perfect, so there will always remain some small amount of error in position estimation due to inherent sensor bias and drift.
A major challenge in sensor fusion is the ability to identify erroneous data and thus filter it from to minimize the accumulation of errors. This requires sensor fusion processing techniques that can logically deduce what is actually happening in the presence of conflicting data. As a simple example, if the gyroscope data is “suggesting” rotation, however, simultaneous accelerometer and magnetometer data is “suggesting” being at rest, the fusion algorithm may ignore the gyroscope as providing an erroneous output due to sensor bias.
PDR algorithms rely primarily on the ability to determine the instantaneous heading or direction of motion of the user with respect to their environment and how far the user has travelled in that direction. With the primary requirements satisfied by the INS or IMU hardware, the algorithms detect or recognize patterns of movement in the dead-reckoning data to determine the person’s activity type; such as walking, running, stair climbing, standing up and sitting down, for example. Similarly, adjustments in distance calculations are implemented for each type of activity to help maintain estimation accuracy. To provide workable PDR solutions, algorithms need to be designed that can not only effectively filter erroneous sensor data, but also handle variances in human movement that can range from very subtle differences in movement to very large changes.
Algorithm Training
During the design of a pedestrian dead-reckoning (PDR) system, “training” of algorithms is required to build up a range of motion related information that can be applied in real-world scenarios, including things like obstacles, such as opening and passing through doorways, traversing inclined terrain, and different types of terrain such as pavement, gravel, and soft terrain such as sand and grass. This will typically entail extensive and complex testing in various field environments to determine means for identifying when the user is, for example, walking downhill from flat or passing through a slowly revolving door. Testing with the aid of GNSS or other position aiding , then to compare dead-reckoned estimations with actual position. The reliable detection of a step being taken is an initial requirement.
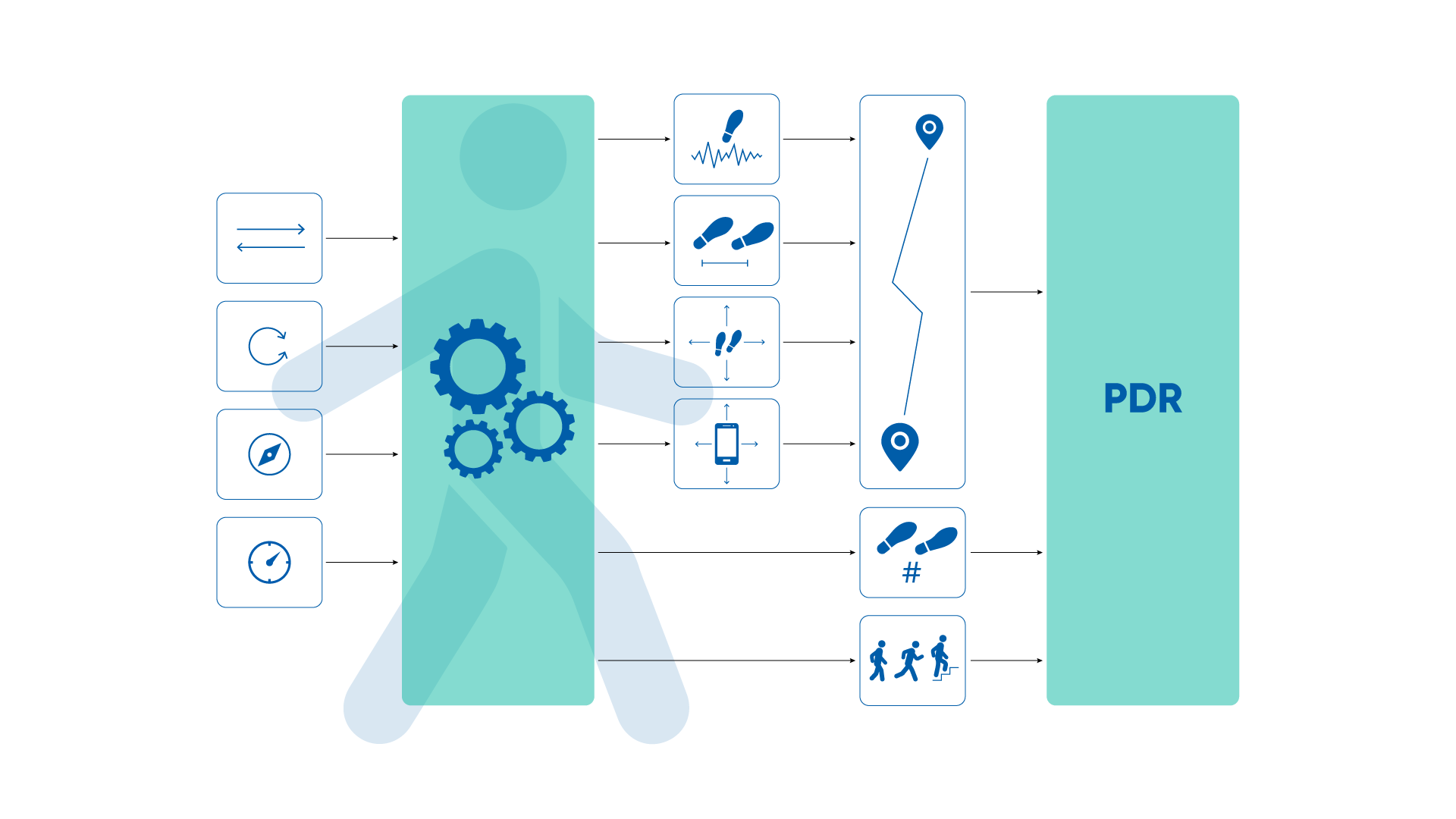
Example of a pedestrian dead-reckoning system. From left to right; raw inertial data from accelerometers, gyroscopes, magnetometers and barometer is fused and processed. This is combined with step detection, stride length, step heading and device orientation to provide trajectory (heading and distance) of the person. The user’s trajectory, step count and a means of detecting the type of activity are fused and processed to provide a PDR solution.
Other Considerations in a PDR System
Pedestrian dead-reckoning remains an emerging technology due mainly to being able to successfully detect and process the complexities and nuances of human movement as the wearer tackles different terrains, tasks and environments. A PDR device is likely to be attached to the user’s clothing or a belt, for example, and this can make the device orientation unpredictable. This introduces additional discrepancies between device heading and user heading that are practically non-existent in strap-down INS vehicle applications.
Wearing the Pedestrian Dead-Reckoning Device
The placement of the PDR device on a person is a challenge that needs to be well considered. For example, mounting the PDR around the ankle, for example, may provide more obvious indications of movement to the INS than other locations on the body, however, the practicality of such a location may be problematic. As another example, wearing a PDR device on the wrist would likely be highly impractical due to arm swinging and other movements that are not necessarily associated with the user’s motion.
Wearing a PDR device on the chest or is in some way forward facing is probably the most effective solution when it comes to matching the wearer’s heading with that of the device, but again may be suited more to applications where a suitable uniform is worn by the user. Belt mounting may be another option, but again, belt looseness and orientation of the PDR relative to the user may change during use. Head mounting is probably the most effective placement, but is obviously limited to applications where the user is wearing a helmet or similar.
PDR User Interface and Wearer Customization
It is reasonable to assume that a PDR device will either have an in-built user interface or otherwise wirelessly connect to a smartphone or similar so that users can access their current location coordinates. The design of the PDR device and the intended application may provide additional recorded data to users, such as distance travelled, elapsed time, and altitude. Perhaps even reverse directions of the route taken can be provided so the user can easily navigate back to their starting point.
In order to prepare a PDR device for use, it is possible that the user will need to calibrate the unit. This might entail the user wearing the device and performing a series of calibration activities (perhaps several times) that the PDR system uses to determine identifiable patterns from the inertial sensors when walking on flat, hard ground, and ascending / descending stairs amongst other things. This will customize the PDR algorithm to recognize the user’s movement associated with each activity to help ensure that activity detection, stride length and other necessary parameters are as accurate as possible.
Where Can Pedestrian Dead-Reckoning be Used?
The idea of pedestrian dead-reckoning is typically to enable people to navigate an environment without being aided by GNSS satellite signals, antennas and receivers, or other infrastructure that can be used for positioning. This may be referred to as “passive localization”. To be effective as a means of providing absolute position information; that is, where you are in the world, however, the PDR device requires a starting position. The dead-reckoning estimation of location from that point onwards is calculated relative to the starting position.
PDR can be extremely useful in environments where GNSS is unavailable or signal reception is degraded or otherwise unreliable. PDR has a range of practical applications, including:
- Search and rescue – In emergency response situations, the location of personnel for search and rescue can be critical to saving lives. This can be crucial inside buildings, where once inside, location becomes unknown. Injured persons that cannot be immediately removed or treated at the scene can be located for evacuation or onsite treatment by others equipped with PDR to find them. Another example of PDR may be during search and rescue operations where terrain, vegetation cover, being underground or similar obstructions prevent the availability of direct GNSS derived location information.
- Navigation for people with disabilities – Vision impaired people, for example, may be able to use PDR to help find their way through the home or within buildings that can provide internal positioning that can connect to the PDR device. This may be through wifi, bluetooth® or ultra-wide band (UWB) positioning systems, for example. In outside applications where visual navigation is not possible, PDR and GNSS can help users move safely and efficiently and help prevent confusion and getting lost.
- Medical research – Neuroscientists can use PDR devices attached to patients to help research and understand the effects and early onset indicators of diseases and conditions that affect movement, such as Parkinson’s disease, muscular dystrophy, and motor neuron disease.
- Mining personnel location – PDR can be used in underground operations, such as mining, to help personnel keep track of their location. This can be a solution to help prevent personnel getting lost or otherwise losing location with regard to their whereabouts underground. In such a scenario, it may also be possible for users to report location as provided by PDR to above ground personnel to help ensure that they remain in safe zones, for example.
- Wilderness areas – Traditionally the home turf of maps and compasses, PDR can offer a viable alternative or backup positioning solution. This can be especially useful where the environment is difficult to navigate using traditional means and/or where GNSS is unreliable.
- Emergency services and military – Police, fire brigade and military services can deploy PDR to provide redundancy when other means of location are unavailable. In covert operations or where GNSS may be jammed, spoofed or unreliable, users can benefit from PDR to avoid reliance on external positioning systems and to assist in preventing detection.
As PDR development increases in stability and precision, use cases outside of the above examples will certainly become more prevalent. This makes pedestrian dead-reckoning an exciting technology with many useful functions.
Recent Tech Articles
How Improved Positional Accuracy Can Transform Mining Excavation
Explore the new standard in absolute positioning for GNSS-denied environments. See how the Chimera Land LVS and INS pairing anchors real machine motion.
15 June 2026
Go to Article
High-Precision Navigation at Scale for Counter Drone Technology
Unlock precision for your kinetic effector on-the-move. Discover how Advanced Navigation delivers the stabilization and supply chain speed needed for scalable counter drone defense.
18 May 2026
Go to Article
Navigating the Future of Mining Operations
Discover how to improve product quality in manufacturing through Advanced Navigation's rigorous supply chain and exhaustive validation.
5 May 2026
Go to Article