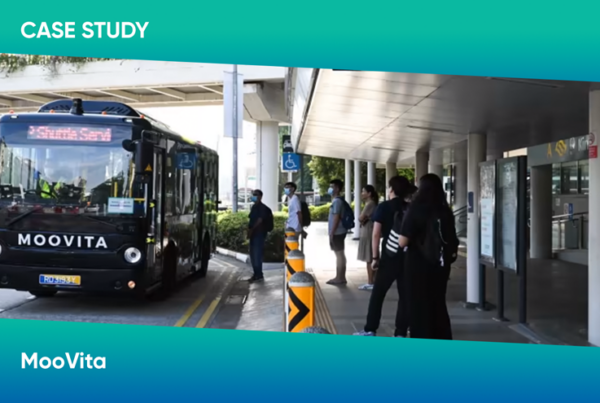
Onboard with MooVita: Towards the Next Stop in Autonomous Transportation
27 March 2024
Certus Evo is an ultra-high accuracy MEMS GNSS/INS that combines low SWaP-C (Size, Weight, Power, and Cost) and FOG-like performance.
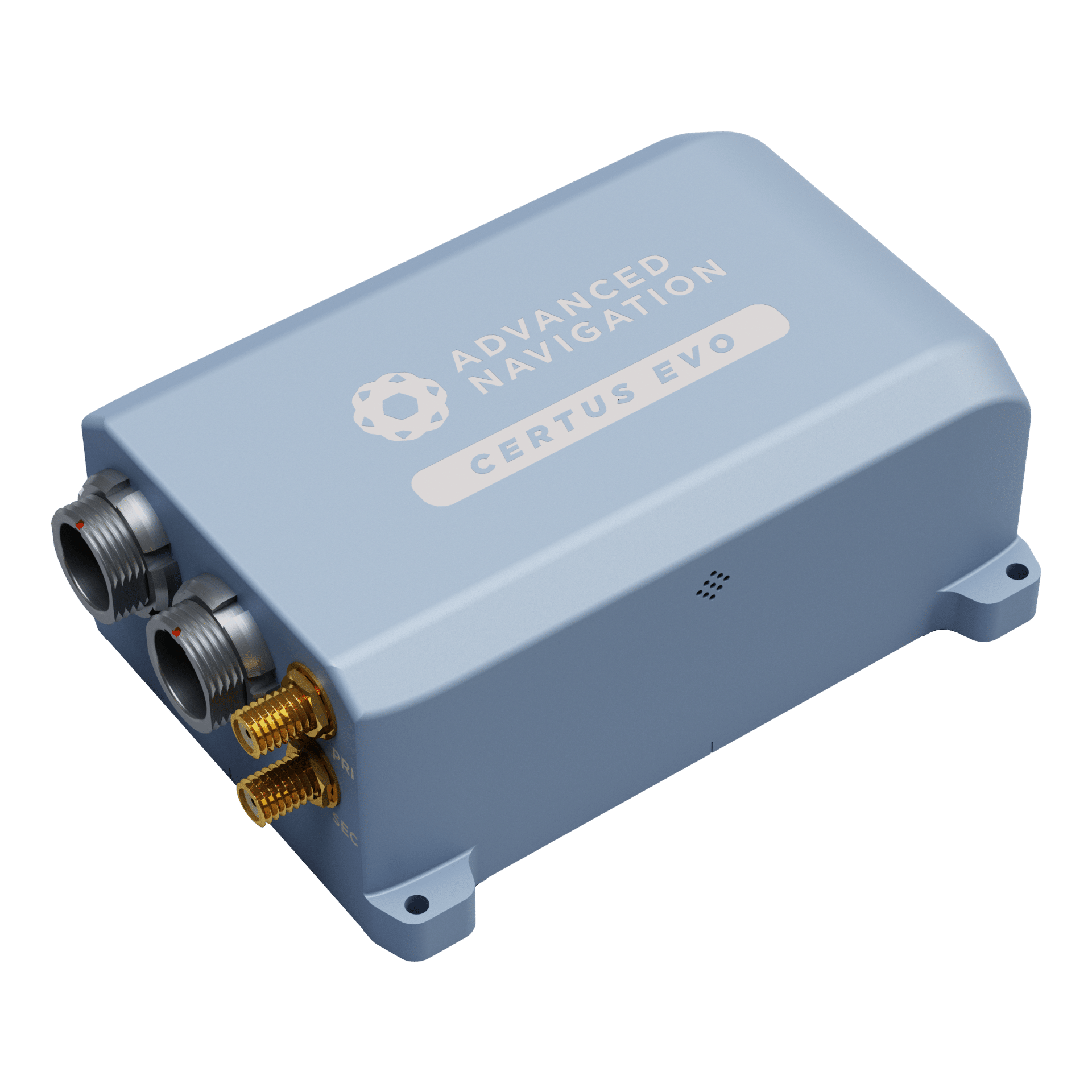
Certus Evo is an AI-based MEMS GNSS-aided INS that provides extremely accurate position, velocity, acceleration, and orientation under the most demanding conditions. It offers FOG-like performance combined with the reliability and affordability of MEMS sensors. It features low SWaP-C (Size, Weight, Power, and Cost), internal data logging, and multiple communication interfaces for easy integration. Certus Evo is available in both OEM and rugged packages and comes standard with license-free 1 cm RTK position accuracy. Certus Evo is compatible with our post-processing kinematic (PPK) software Kinematica.



Certus Evo features Advanced Navigation's revolutionary AI neural network sensor fusion algorithm. This provides accuracy of up to 10 times that of a traditional kalman filter. It was designed for control applications and has a high level of health monitoring and instability prevention to ensure stable and reliable data.

Certus Evo contains a dual frequency RTK GNSS receiver that provides up to 1 cm accuracy positioning and supports all of the current and future satellite navigation systems, including GPS, GLONASS, GALILEO, BeiDou and QZSS. Dual antenna heading provides high accuracy heading that is not impacted by magnetic interference and has no motion requirements.

Certus Evo contains a GNSS disciplined oscillator that can act as the primary time source within a distributed time system, enabling access to ultra-accurate system time using PTP or NTP network time sync. Certus also has a high-accuracy 1PPS and frequency output.

Certus Evo features multiple interfaces including Ethernet, CAN, RS232, RS422 and GPIOs. Certus supports all the industry standard protocols including NMEA 0183, NMEA 2000, TSS, PASHR, Simrad as well as a wide variety of proprietary protocols. It feaures a rich web UI and 256GB of internal logging.
Certus Manager is used for testing, configuration, firmware management and logging with Certus. Java 11 is required to run Certus Manager v7.0 and later. Adoptium JRE 11 is the recommended Java installer. Please see the reference manual for more information.
11 Apr 2024 – v7.3
Please select a topic below related to your enquiry. If you don’t find what you’re looking for, fill out our contact form.
© 2024 Advanced Navigation. All Rights Reserved


