
INS Evolution Helps EyeVi Technologies Achieve Scalable LiDAR Survey Efficiency for Road Networks
Share:
Published on:
Key Points
- Road infrastructure maintenance is a massive, global money pit that requires high-tech, smart solutions such as LiDAR survey technology to deal with effectively. EyeVi Technologies selected Advanced Navigation to provide reliable, accurate inertial navigation in difficult urban environments.
- The SWaP+C of Spatial and Certus Evo INS enables the EyeVi Technologies solution to be very scalable, high performing, and remain within client budgets.
- The Advanced Navigation standardized API enabled EyeVi Technologies to move up the accuracy spectrum without incurring re-engineering costs.
- Certus Evo provides near-FOG performance in GNSS denied scenarios whilst retaining the affordability and reliability of MEMS based INS.
EyeVi Technologies, Estonia
EyeVi Technologies is an AI-powered digital geospatial data production company. Their mission is to make the management of road infrastructure sustainable through digitalization. The EyeVi Technologies road network intelligence platform enables engineers to build digital twins of the infrastructure that make road inspection 14x faster and 10x more cost-effective. Through the EyeVi Technologies AI-powered automated 3D mapping platform, their clients have a constant overview of the entire physical road network with maximum detail for predictive road maintenance, road asset and traffic management, safety auditing, and autonomous transportation.
The EyeVi Technologies mobile road LiDAR survey and mapping solution has been developed with emphasis on scalability that enables it to be used to cover local area road networks, city-scapes and even entire states and countries. The focus is to capture real-life conditions and enable fiscally responsible and sustainable survey update intervals. The value of the EyeVi Technologies solution is recognized across numerous European and Nordic countries and is expected to cross oceans and become adopted internationally.
Table of Contents
- The Challenge: Delivering Affordable Road Network LiDAR Survey
- The Solution: Spatial to Certus Evo MEMS GNSS/INS
- The Result: Streamlining Road Infrastructure Management
Roads are critical infrastructure throughout the world. Deliveries of goods and services and simply enabling people to travel and physically connect is essential to what they provide. To keep pace with population growth, urban expansion and vehicle use, road networks continue to swell rapidly. The millions of kilometers of paved roads that have been constructed, and continue being built, are generally fragile in the long term and require regular maintenance and repair to keep them safe for use.
We all know bad roads and curse as the wheels and suspension take another beating through poor road maintenance. Those that are responsible for roads know it, too. The problem remains of how to manage such vast networks of roads, curbs, signs, signals, lane markings and so on and how to spread limited budgets and resources over enormous sections of bitumen. Traditional techniques, relying on eyes and complaints can cherry-pick certain areas to which road crews and equipment are sent to fix individual issues. This is not only expensive, but very slow and carbon heavy.
The result is not only frustrated motorists and damaged vehicles, but huge backlogs of roadworks that amount to staggering sums of money. Roads are primarily tax payer funded, which makes the situation even worse. The solution to managing backlogs of inspection and maintenance is to use a smart combination of technologies that make the data capture and processing fast, cost-efficient, and scalable. This is where EyeVi Technologies steps in.
The Challenge: Delivering Affordable Road Network LiDAR Survey
EyeVi Technologies saw the scale of the road infrastructure maintenance problem several years ago and have developed a solution to help change the current status quo of inefficiency and waste using LiDAR, GNSS INS and AI. Their solution, which they call “road network intelligence”, can be simply deployed and requires no outright purchasing or capital expenditure by the client. In effect, it is a “road survey as a service” model, where cost is based on the amount of road surveyed. The system is mountable on almost any type of vehicle, which are then deployed to drive the required routes. Much like standard land-based mapping.
The collected LiDAR survey imagery is then processed using AI to automatically identify features of interest and to provide an easily referenced dataset to clients. The LiDAR road survey data requires both accurate navigation and precise timing to ensure that point clouds and absolute position are exact. The data, which is in 3D map form, provides visual, color-coded identification for all sorts of metrics, such as fissures and cracks, potholes, lane markings, signage, barriers and so on. Measurements of affected areas help in gauging severity, prioritizing repairs and estimating the required materials, equipment and labour. There is an extensive list of features that can be selected from, making the solution highly customizable.
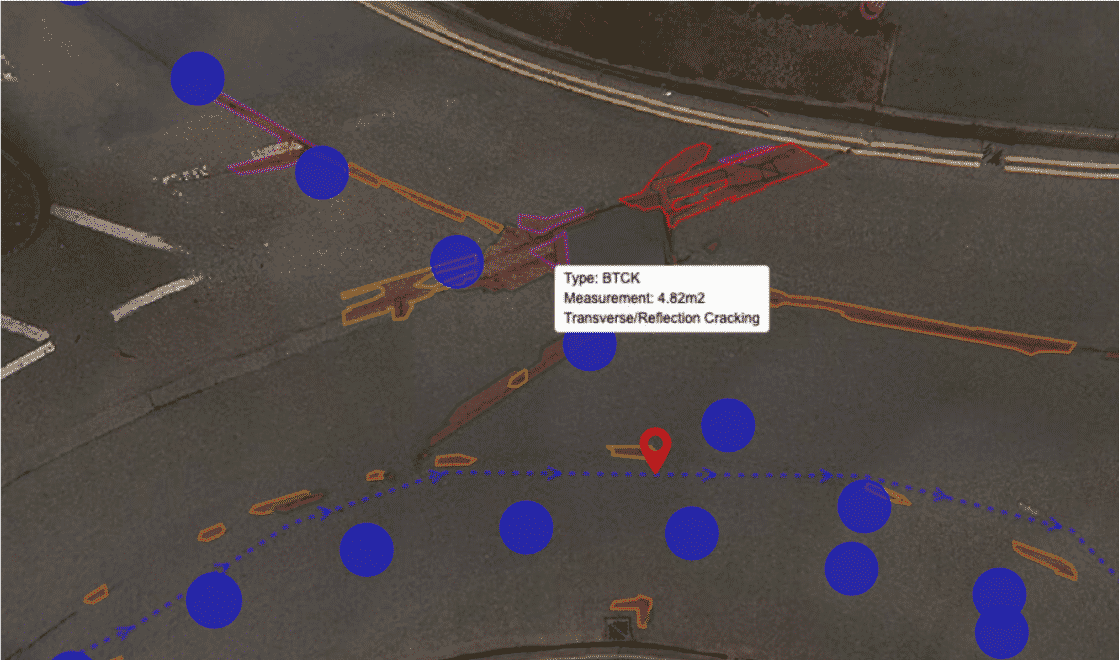
Example image showing defects in surveyed road
The main challenge EyeVi Technologies faced in developing the system was how to maintain navigational accuracy and timing precision in highly variable and often very difficult environments. GNSS provides the initial means for gaining position data and timing, and this works very well in rural environments with lots of open sky. Cities and urban areas, on the other hand, present considerable challenges to GNSS availability. For example, buildings that block, bounce and reflect satellite signals and tunnels that can completely disrupt GNSS for considerable distances.
For EyeVi Technologies to guarantee reliable, useful results for clients, their LiDAR road surveying system demanded an INS that would cope with being vehicle mounted, often traversing rough roads, traveling at speed whilst delivering consistent accuracy using inertial navigation and precise time-stamping for the LiDAR data.
The Solution: Spatial to Certus Evo MEMS GNSS/INS
During the initial stages of solution design, the team and EyeVi Technologies embarked on a search for a suitable INS. They welcomed the fact that they could easily access information on Advanced Navigation products, including technical data and protocol integration information. This created the foundation for an enduring partnership that has progressed from prototyping using Spatial GNSS/INS to system-ready using Spatial Dual (dual GNSS antenna) and now, Certus Evo (also dual antenna). The Advanced Navigation platform affords altering the accuracy grade through different hardware and/or technology options, without additional engineering.
“With the experience of several successful integrations, we have the trust and familiarity to know that you can’t have a better INS from somewhere else for the same money. Not only that, having a solid and well documented protocol and not having to re-engineer as we upgraded our hardware has made using Advanced Navigation very convenient for us.”
Riivo Kolka, Senior Software Engineer, EyeVi Technologies

EyeVi Technologies MMS payload consisting of 360° camera, LiDAR and INS
This evolution between the INS and the EyeVi Technologies mapping solution has provided greater accuracy and precision at each iteration of the hardware. This furthers the scalability of the solution by increasing the scope of use through offering increased accuracy to clients. Although the system is sensor agnostic, when providing hardware, EyeVi Technologies provides what they know to work from tens of thousands of kilometers of roads already surveyed. This is why they use Certus Evo and Kinematica post-processing software.
The evolution from Spatial to the Certus Evo INS has been inspired by requiring increasingly accurate heading, which caused the shift to dual antenna technology, and a continued search for higher INS precision. The near FOG accuracy of the Certus Evo has enabled EyeVi Technologies to improve their product without introducing large additional costs associated with FOG technology. This is mainly to keep the model scalable for clients to retain cost effectiveness, whilst offering excellent results. Much of the established players in the land survey space are equipped with very expensive FOG-based systems. This typically prices them out of reach to small institutions, councils and municipalities for this kind of survey work.
For scalability to be maintained, the selection of base hardware and post-processing must work in parallel with system design and planned expansion of features and capabilities.
“Integration to camera, LiDAR and our proprietary data capture software has been easy. Based on the tens of thousands of kilometers we have surveyed in recent years and considering the sensitivity of the INS, the reliability and results have been fantastic.”
Mihkel Lehtmets, CMO, EyeVi Technologies
Due to the typical nature of the surveying environment and the tendency to experience frequent GNSS disruptions, EyeVi uses Advanced Navigation Kinematica software to post-process INS data for improved accuracy. The Kinematica API enables EyeVi to automate upload and download of data, which furthers the convenience and reduces delivery time to clients.
Kinematica applies local GNSS base station correction information to the data to achieve near survey grade position, roll, pitch and heading accuracy. Generally, position accuracy to within ~5cm (2”) is acceptable. It should be noted that because the hardware is vehicle mounted, being able to identify and remove erroneous data is very important. For example, sudden vehicle movements caused by bumps, potholes or abrupt changes of direction need to be filtered. Advanced Navigation’s unique AI enhanced filtering is extremely effective at this due to its automated learning and self-attenuating capabilities.
“The challenges are when clients are recording data in busy environments, such as cities with big buildings and obstructions. That is a challenge for any INS. Not only the raw performance, but the post-processing afterwards as well – how well can it handle these difficult environments. This has made Advanced Navigation one of our key hardware choices right now.”
Comments Lehtmets
The Result: Streamlining Road Infrastructure Management
The EyeVi LiDAR road surveying solution is being enthusiastically received in many parts of the world due to its effectiveness and affordability. This success can be attributed to its high performing artificial intelligence data processing platform that is tightly coupled with the data captured by the Advanced Navigation system. The use of Advanced Navigation MEMS GNSS/INS products has enabled EyeVi Technologies to get the best data at an affordable price.
EyeVi required an INS that would remain reliable in metropolitan environments that present numerous conditions that can adversely affect GNSS reception. The company has used several Advanced Navigation MEMS INS products and found them to be eminently suitable to the required conditions as well as handling the shock, vibration and unpredictability of road vehicle deployment.
Advanced Navigation’s integration protocol layer has made upgrading the accuracy of the INS from Spatial to Certus Evo very easy and without requiring re-engineering. The choice of Certus Evo is particularly important as it delivers close to FOG accuracy but remains within the price band of MEMS INS. This has enabled the company to increase accuracy and customer satisfaction whilst keeping the solution scalable in terms of cost to EyeVi Technologies and their clients.
“Our business model is built on scalability, accuracy and efficiency in mind. That’s what we target. And that is also the reason for choosing the grade of INS that we have.”
Comments Lehtmets
EyeVi Technologies is succeeding in this extremely important, but little talked about, market. They plan to expand operations to other locations, including the US, where it is estimated that the current backlog of remedial works alone exceeds USD400 billion. In helping solve this dilemma through smart digitization, the benefits to road asset managers, motorists, businesses and taxpayers cannot be underestimated.

Certus Evo
Certus Evo is an AI-based MEMS GNSS-aided INS that provides extremely accurate position, velocity, acceleration and orientation under the most demanding conditions. It offers FOG-like performance combined with the reliability and affordability of MEMS sensors. It features low SWaP-C (Size, Weight, Power, and Cost), internal data logging, and multiple communication interfaces for easy integration. Certus Evo is available in both OEM and rugged packages and comes standard with licence-free 1 cm RTK position accuracy.