Key points
- The Ted autonomous agriculture robot requires high precision heading capability to tend precious grape crops successfully.
- The GNSS Compass exceeded expectations, delivering class-leading heading accuracy and motion sensing at a competitive price.
- Operational efficiency of the robots has increased due to precise stationary heading and improved tight-turn accuracy.
- Plug and play installation and environmentally resilient design made GNSS Compass a clear choice for the Naïo Technologies design team.
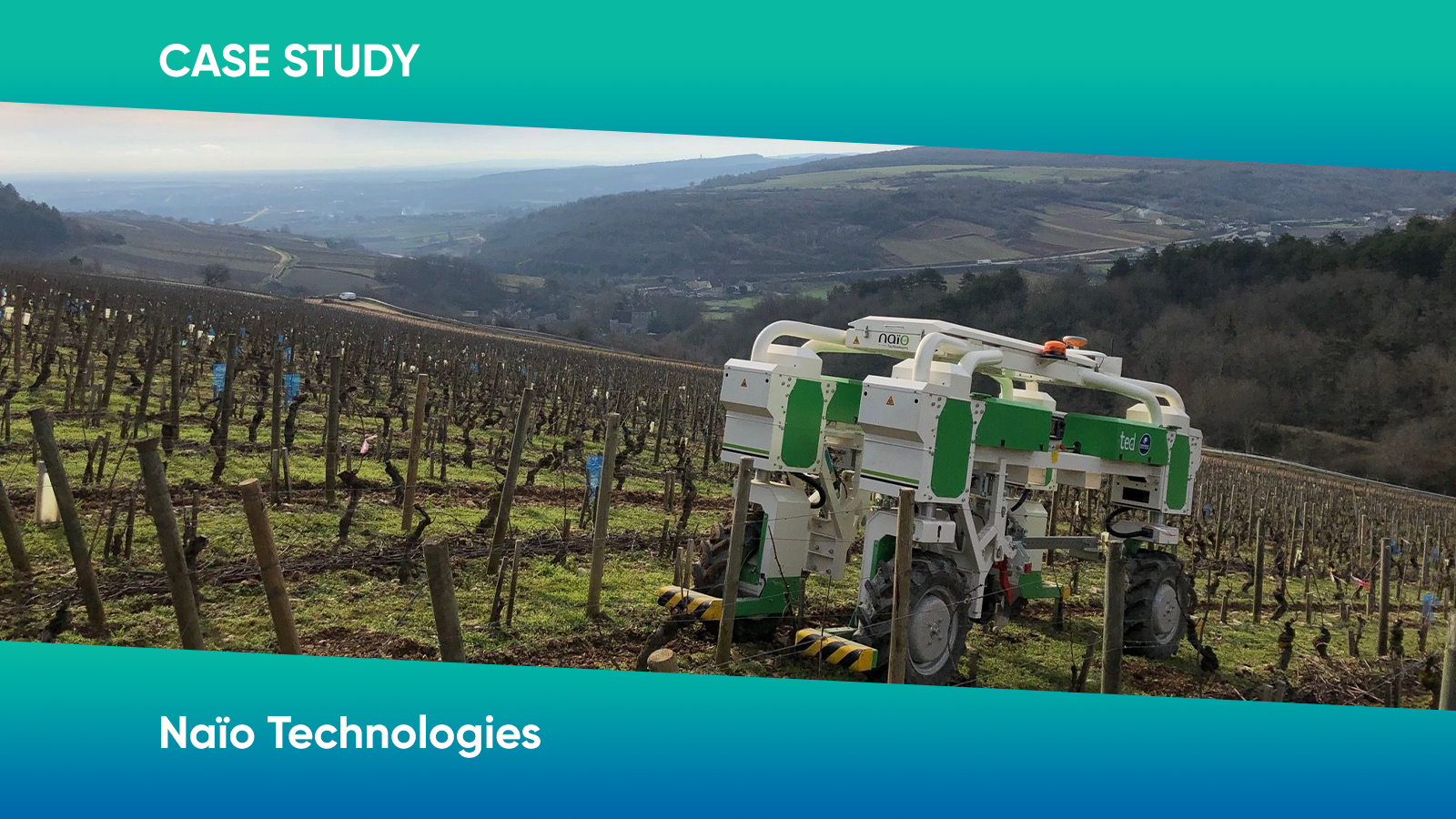
Naïo Technologies, France
A pioneer in agricultural robotics, Naïo Technologies designs, develops and markets 100% electric autonomous robots to assist farmers in their daily tasks. They thus make it possible to lighten the workload, to optimise the profitability of the farms while limiting the use of chemical inputs.
“Ted” is an autonomous vineyard straddle robot that provides an alternative to the use of herbicides, respects your soil, and improves your working conditions.
Table of Contents
-
Economic advantages of autonomous agriculture
-
The project: Developing an autonomous agricultural robot specifically for the challenges of grape growing
-
The challenge: Improving heading accuracy in and amongst the vines
-
The solution: GNSS Compass provides superior heading and simple integration
-
The result: Accurate and responsive heading above expectation
Farming has traditionally been a labour intensive enterprise that would involve the hands of many labourers, with horses or donkeys pulling implements to till and cultivate. Later, tractors greatly sped up the heavier tasks by dragging larger and heavier implements over fields and crops. Today, the global focus for farming and agriculture in general is to attempt to automate the labour and machinery intensive practices using robotic technology.

Autonomous agriculture robots will need to replace an increasingly difficult to find labour force
For the viticulture sector (grape growing), the limited amount of land suitable for wine production typically requires grapevine rows to be planted very closely in order to maximise production. Autonomous and robotic agriculture is being broadly adopted in various agriculture all across the world. However, making it viable for the specific nature of viticulture presents several challenges. The general nature of the planting makes access to larger vehicles difficult and also the fact that heavy vehicles are great enemies of the soil. Tractors weighing several tons and having concentrated footprints deeply compress the soil bed, heavily compacting it. This presents numerous problems – air is expelled from the soil, which solidifies the soil and makes it difficult for water, nutrients and air to pass through and reach the roots of the crop. Soil erosion increases as the soil loses its ability to hold water, causing crops to no longer thrive and be more prone to disease. The heavier the vehicle, the greater the soil compaction and the greater the difficulties for crop growth. This has prompted the use of artificial means that are intended to compensate for reduced soil quality, such as fertilisers and other non-natural additives – not a good prescription from a sustainable, organic perspective and long-term production.
Grape growing for wine is specialised agriculture, developed and perfected over thousands of years, and typically requires specific climatic conditions for success. The soil composition is also extremely important for various grape types and for producing sufficient yields of wine-quality grapes. Due to the limited agricultural land that is suitable for successful grape growing, the need for vignerons (grape growers) to carefully tend grapevines for good crops year on year is paramount. Grapevines can survive and be croppable for a hundred years or more, so it becomes imperative that they are preserved and adequately nurtured for as long as possible to help ensure grape quality.
The problem with a reliance on hired labour is being able to call on a temporary workforce at the necessary times and to react to prevailing conditions. For example, weeding must be done quickly and simultaneously over the entire crop to prevent regrowth in previously weeded areas. Weeding, picking and tilling may require dozens of people on hand for a matter of weeks, but with populations tending towards metropolitan living, where do farmers find willing and able labour? One answer is robots to tend fields and crops – the technology is mature enough to be reliably deployed and the rewards are immediate.
Economic advantages of autonomous agriculture
Autonomous agriculture robots will help solve many problems that farmers face with labour shortages, time constraints and improvements in efficiency. These and other agri-demands have caused Naïo Technologies to offer use of their agricultural robots in an on-demand model (RaaS – robot as a service), which largely eliminates capital expenditure for clients. This makes their autonomous agriculture robot solutions economically viable, with interest in adopting the technology being generated throughout the world.
The RaaS model has several other benefits through increasing effective time in the field of agriculture robots across many farms. Extended use helps offset the resources consumed and carbon emissions from the manufacturing process, rather than one robot per farm being used sporadically. Production of equipment for use in a service-based model means ensuring longevity, reliability through robust design and using the highest quality components. This also maintains the Naïo Technologies philosophy of improving agricultural output by way of efficiency, sustainability and sound environment and soil management.
The project: Developing an autonomous agriculture robot specifically for the challenges of grape growing
Naïo Technologies is a forerunner in agricultural robotics and autonomous farming since first launching in 2011. They have developed several series of robots to meet the demands of various agricultural needs and base their designs on a philosophy of sustainable stewardship towards soil and the environment.
The Ted autonomous robot was born of a need to specifically assist vignerons. Unlike some other types of agriculture where the crop is physically removed from the soil, grape vines need to be preserved. This requirement has determined the physical shape of the robot so that it can straddle the vines, with implements mounted low down to access the soil at the base of the vines. In an effort to ensure the most widespread adoption of the Ted system, Naïo Technologies has not only designed a range of implements for various tasks, but are making the robot to be implement agnostic. This means that farmers can use implements they already have.

Example image showing a Ted robot operating in the confines of a vineyard
Making a robot suitable for vineyards meant that it must be extremely manoeuvrable and be light enough to prevent deep soil compaction. In the spirit of environmental sustainability, the robot is fully electric and can work up to 5 ha (>12 acres) per day. In recognition of outstanding design and engineering that combines cutting-edge robotics hardware and artificial intelligence, the Ted robot received an honorary mention (Robotics category) at the 2022 CES Innovation Awards. Ingrid Sarlandie, COO at Naïo Technologies describes some of the motivating factors behind the company and its products.
”Labour issues and the need to reduce the use of pesticides are global challenges. Naïo Technologies addresses these issues to ensure a sustainable agricultural production that is in phase with people and the environment.
Ingrid SarlandieCOO, Naïo Technologies
The challenge: Improving heading accuracy in and amongst the vines
Naïo Technologies uses a navigational device for positioning that is an intrinsic component of their autonomous robot designs. For general agriculture, this has proved reliable, however, for vineyards and precision agriculture applications, the roll, pitch and heading accuracy was not sufficient. This was a major challenge to successful operation in and amongst the vineyards, where directional accuracy and having precise robot orientation and motion data must be absolutely reliable.
A major and common hurdle in autonomous agriculture is for robots to accurately determine course and heading whilst navigating fields and crops. This is exacerbated by rough, rapidly changing terrain and when different levels of traction are available at the driven wheels of the robot. For example, the wheels on one side traversing grass, the wheels on the other side traversing mud. In such situations, one side of the robot may slip and the other side may drive – this tends to skew the robot slightly in direction (heading). Due to the typically tight vineyard rows, if any deviation in heading is not detected accurately and rapidly corrected, the robot can potentially drive into the vines or otherwise off-course. Another problem to overcome when manoeuvring in very tight vineyard rows (the Ted can rotate about its centre) is the ability to establish heading without requiring the robot to move, as any movement where heading is not known can potentially be hazardous.

The example image shows the potential results of the robot skewing due to differing levels of traction at the driving wheels. The upper robot is skewed but has insufficient heading accuracy to correct. The lower robot, using GNSS Compass, is able to correct heading and continue safely travelling the crop row
An additional requirement for rural applications is for the heading and orientation data to be reliable and accurate in noisy environments. That is, maintaining accuracy whilst travelling over rough terrain and being subject to multi-directional shock loads and high levels of vibration from the use of implements. A level of robustness is also required as the equipment must be exposed to the elements and, therefore, subject to varied climatic conditions. These challenges had to be met whilst retaining full autonomy in order to provide farmers with maximum benefit.
”Real autonomy, as requested by our clients, means being able to leave the robot to work alone in a field in order to get on with tasks with a higher added value. The challenge lies in delegating a simple, repetitive task to your robot, just in the same way you would leave a robot vacuum cleaner or a robot lawnmower to do its work.
Matthias CarrièreManager of Sales and Clients, Naïo Technologies
The solution: GNSS Compass provides superior heading and simple integration
The engineering teams at Naïo Technologies spent considerable time trialling various products from different manufacturers to improve motion detection and heading. This included satellite compasses, individual GNSS receiver antennas and inertial measurement units (IMU). They took into consideration various factors such as accuracy, ease of integration, size and cost for the application. Ultimately, after exhaustive field testing, they selected the Advanced Navigation GNSS Compass.
The integral design on the GNSS Compass, with fixed architecture dual RTK GNSS antennas and in-built IMU made for a much simpler fitment and integration when compared to using independent RTK antennas and IMU module. Using the GNSS Compass, additional mountings and antenna alignment complications were eliminated. Also, cabling requirements were reduced with the added benefit of less overall components and connection points of failure and minimal weight. The overall size and single point mounting of the GNSS Compass also made it easy to install, with no effect on the width of the robot.

GNSS Compass mounts neatly to the straddle frame of the robot. The compact size of the unit works well and causes no issue with other components
Advanced Navigation provides a software development kit (SDK) for the widely used Robot Operating System (ROS). The integration tools enable a straightforward means to inject heading and motion data from the GNSS Compass into the robot navigation and control system, maximising simplicity of the integration.
The result: Accurate and responsive heading for autonomous robots that exceed expectation
Autonomous agriculture robots like the Ted are required to have multiple safety and perception/sensor systems to operate without human supervision. The perception system allows the robot to detect people and objects and to always remain within defined operational boundaries. For example, if the robot detects a loss of GNSS signals or the presence of a person within a certain distance, it assumes a safety driven state (this may also be thought of as an error or failure mode). This is typically to stop until the error condition or safety state is removed and it is safe for the robot to continue moving. To this end, Naïo Technology have successfully had their autonomous farming robots certified to operate completely unsupervised within the EU.
To maintain the necessary level of safe, controlled autonomy, waypoints are required to determine the start and end locations of each crop row. These are defined for each vineyard by a deployment team, so movement and positioning is mission based and allows the robot to operate at night. The results the Ted developers achieved after testing the robot with an integrated GNSS Compass were better than anticipated.
”The GNSS Compass helped us achieve heading accuracy to ~1°. Turning of the robot also became smoother and a lot more stable, and our ability to calculate the centre of the robot relative to the ground gained a lot of accuracy.
Joan AndreuHead of Research and Development, Naïo Technologies
The Ted developers also found that, unlike other units they tested, the GNSS Compass was able to attain heading without the robot having to move. In the confines of the vineyard this was extremely important as the Ted robot must rotate at the end of each crop row and provide very high levels of certainty that heading is accurate before the robot drives forward. This “cold start” or stationary heading capability increases the efficiency at which the robot operates.
Due to the overall form factor and versatility of the system, Naïo Technologies is considering adopting GNSS Compass for heading on their other robots, including small form-factor variants.
“We were initially looking for a solution for our large and long [Ted] robot, suffering from sliding when passing over different soil textures, and for cold start navigation. The solution is very well adapted to both our large and small robots.” concludes Andreu.
GNSS Compass
The GNSS Compass is a low-cost all-in-one GNSS/INS navigation and heading solution. It provides accurate dual-antenna GNSS-based heading that is not subject to magnetic interference and can maintain accurate heading during GNSS outages of up to 20 minutes. It features high accuracy RTK positioning and is plug and play with NMEA 0183, NMEA 2000, and Ethernet interfaces.