Key Points
- The 8-channel hydrophone array of the Subsonus USBL helped Desert WAVE AUV to successfully complete multiple tasks requiring acoustic location.
- Advanced Navigation assisted the team in overcoming signal reflection and multi-path problems by providing a varied base operating frequency.
Desert WAVE, United States
Created in 2018, Desert WAVE (Women in Autonomous Vehicle Engineering) is a team of female engineering students, formed through a partnership between the Si Se Puede Foundation (SSPF) and Arizona State University (ASU), in response to the general lack of women in some fields of engineering. Lead by engineering lecturer Daniel Frank and Faridodin (Fredi) Lajvardi of the Si Se Puede Foundation, the main purpose of this initiative is to provide encouragement to female students, working in a team environment, with opportunities to apply the knowledge and skills learned in the classroom and bring them to a competitive setting against other engineering students.
The challenge: Accurate acoustic positioning in a difficult environment
The RoboSub competition, hosted July 29 through August 4 2019 by the Office of Naval Research and RoboNation, tasked 55 teams from more than 12 countries with designing and building an autonomous underwater vehicle (AUV). The competition is used to evaluate each competitor’s design and test the autonomy of the AUV in performing a series of tasks.
The competition took place in a 16′ deep test pool, aiming to simulate an ocean environment. The tasks challenge the ability of the robots to manoeuvre through gates, pick up objects and automatically navigate based on sensors.
The team’s autonomous underwater vehicle, named Phoenix, was re-birthed from donated parts from the Carl Hayden High School’s autonomous submarine. Parts includes thrusters, passive sonar, doppler velocity log, fiber-optic gyroscope, and cameras.
A key task for the AUV to accomplish was to detect an acoustic signal emitted by a beacon and navigate to its position. For the Desert WAVE team, an additional difficulty was managing signal reflection and multi-path in enclosed test environments.
The Solution: Subsonus USBL
The Subsonus USBL was provided to the team as part of a sponsorship to help ensure accurate acoustic-based navigation for their AUV. Testing showed that the Subsonus hydrophone array was able to successfully locate the acoustic signal emitted by the beacon.
Prior to the competition, the Subsonus and software used to interpret the information it gathered, was tested for over six hours to determine which beacon location yielded the least signal interference. For the test, the Subsonus was placed in the centre of a pool and acoustic beacon was moved around to provide the necessary data. The best results for limiting the number of reflections was found to be when the beacon was against a wall 0.8m.
The ability to travel in an absolutely straight line was considered a highly critical task, explained Faridodin ‘Fredi’ Lajvardi, Vice President of STEM Initiatives for Si Se Puede Foundation and Desert WAVE team mentor. “If this task could be accomplished, higher-level tasks involving more complicated manoeuvring and navigating would become significantly more conquerable.”
Future tests will be conducted in a larger body of water to further mitigate signal reflection and echoing.





The Outcome: Third place in Robosub 2019 with Subsonus USBL
After placing fifth in the semi-finals, Desert WAVE improved to third place in a competitive final round behind Harbin Engineering University (China) and Far Eastern Federal University/Institute for Marine Technology Problems (Russia).
Third place made Desert WAVE the highest-ranking contestant from the United States and earned them a $3,000 prize. Coincidentally, Arizona State University has been named the most innovative school in America for five consecutive years.
For Lajvardi, there were other successes to be proud of, “We created an environment that addresses the key reasons women cite for leaving STEM. Comfort, achievement, status, altruism, autonomy, in this order, so they can continue to develop as engineers with less societal interference.”
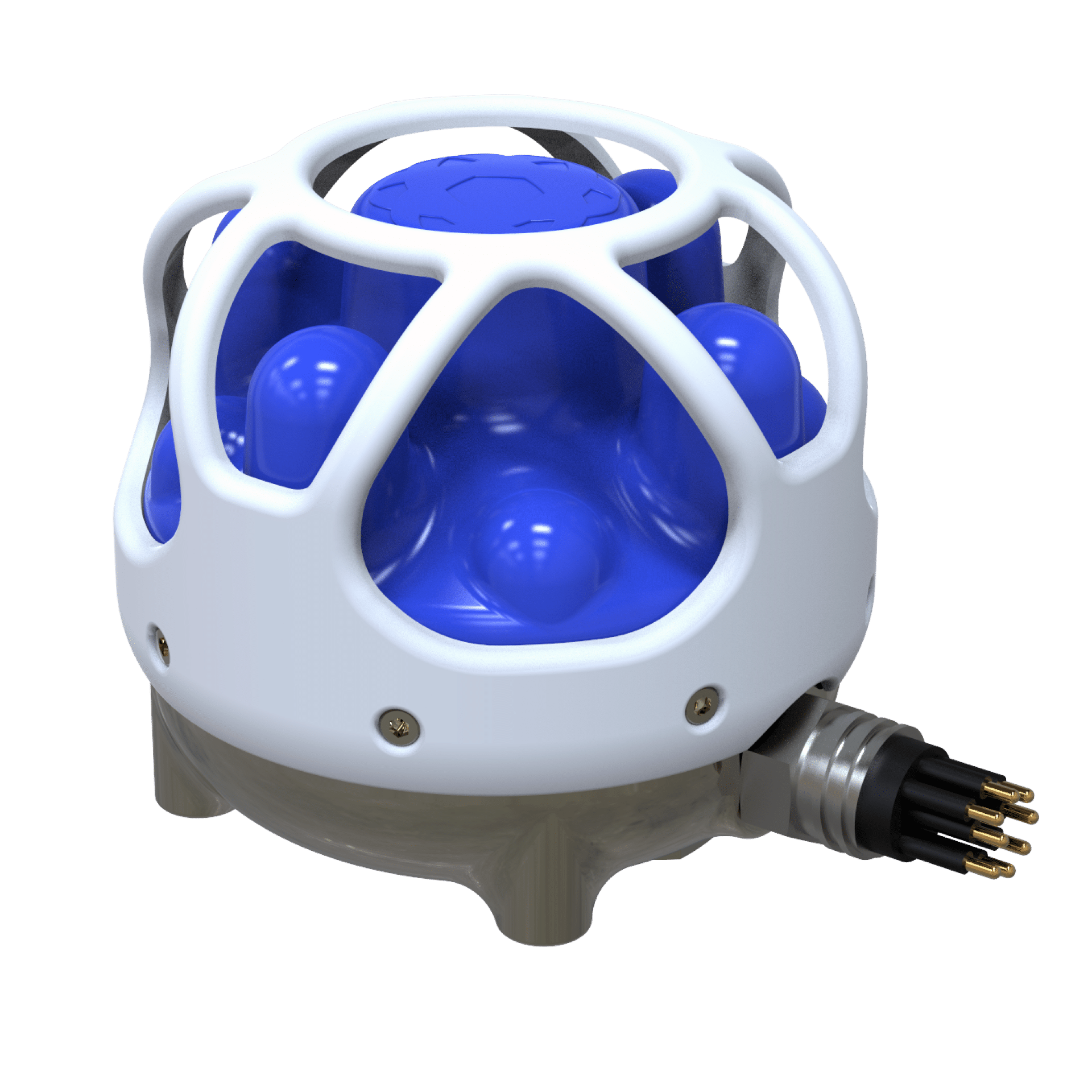
Subsonus
Subsonus is a next-generation USBL underwater acoustic positioning system that provides high accuracy position, velocity, and heading at distances of up to 1000 metres. The system features an industry-leading calibrated hydrophone array combined with an internal tightly coupled INS, all packed into a miniature titanium enclosure small enough to fit in the palm of your hand.