
Certus Evo Helps Nextcore’s UAV-LiDAR Reach New Heights in Both Altitude and Performance
Share:
Published on:
Key Points
- Certus Evo enabled Nextcore’s latest generation UAV LiDAR to accurately survey at >80 m above ground level (AGL).
- Nextcore required a high-performance MEMS INS that would suit UAV deployment.
- High altitude operation improved survey efficiency and kept the UAV at a safer distance to potential obstacles.
- The performance of Certus Evo proved to be an excellent match for Nextcore’s latest LiDAR scanner.
Nextcore, Australia
Nextcore is an Australian-based company that specializes in making UAV-mounted LiDAR systems. Established in 2012, Nextcore’s solutions have been used in the mining industry, by surveyors and environmental specialists all over the world. Acknowledging gaps in the UAV LiDAR market in terms of price and reliability, Nextcore went on to build its own units that far exceed the performance of competitors in the same category.
Table of Contents
- The Challenge: Building UAV-LiDAR That Can Survey at 80 m AGL
- The Solution: Certus Evo MEMS GNSS/INS Satisfies Requirements for Accuracy, Ease of Integration, Payload and Cost-Effectiveness
- The Result: Certus Evo Helps the RN80 Soar Above Expectations
The Challenge: Building UAV-LiDAR That Can Survey at 80 m AGL
If there’s one thing that defines the Nextcore team, it’s their passion to continually improve the technology of UAV LiDAR in order to make cost-effective and reliable equipment that is safe and easy to use. Realizing that increasing altitude could offer significant benefits in UAV survey, Nextcore embarked on designing and building a UAV with a high performance LiDAR and navigation system payload that could deliver a survey-grade dataset from 80 m altitude. This became the RN80 project.
Typical UAV LiDAR surveying is performed at ~40 m AGL. This altitude commonly presents collision risks with terrain and vegetation and imposes limits where the topography changes dramatically, such as voids that increase AGL beyond acceptable limits. Higher altitude surveying, therefore, offers obvious advantages, but also deeply challenges LiDAR sensors and the inertial navigation system (INS). Any mismatch in operational performance and accuracy between these inevitably degrades survey quality and severely limits use of the system.
Nextcore set about developing a viable solution that could maintain a point cloud density of 200~500 points per m2 from an initial target altitude of 70 m. This equates to generating LiDAR point cloud data at millions of points per second. Achieving this required a GNSS-INS that provided suitably precise geo-referencing data. Because survey data is derived from a source that is in constant motion in 3D space, the capability of the GNSS-INS is paramount in producing a digital twin of value and is critical to mission success.
Nextcore’s previous RN50 UAV-LiDAR could survey at a maximum 50 m AGL, which although high, remains at risk of collisions with vegetation and power lines. The team set the primary goal to increase survey altitude to 80 m AGL. Higher altitude surveying was also desirable for several Nextcore clients that were surveying difficult terrains in Japan and Malaysia – they needed the ability to fly their survey drones higher.
Operation at 80 m altitude not only reduces the risk of collisions, it also enables surveyors to cover larger areas in the same amount of time, greatly improving efficiency of the solution. This ambitious target, however, did also introduce some concerns.
“The problem with flying a UAV LiDAR payload higher off the ground is the higher you fly, the more inaccuracies you build into the LiDAR dataset.” says Ashley Cox, COO, and Co-Founder at Nextcore.
Tom Simmons, Technical Officer at Nextcore adds that a major challenge of higher altitude surveying is the accuracy and reliability of the IMU (inertial measurement unit) in use, saying “You’re really relying on your IMU accuracy at that point, and any inaccuracy you have got in your IMU will be reflected in your LiDAR. It will lead to a decrease in accuracy and it won’t be usable data in surveying metrics.”
“The challenge was finding hardware we could put into the system that would allow us to achieve a survey-grade outcome even though we were flying our drones higher.”
Ashley Cox, Chief Operating Officer, Nextcore
The Solution: Certus Evo MEMS GNSS/INS Satisfies Requirements for Accuracy, Ease of Integration, Payload and Cost-Effectiveness
Nextcore had previously used the Advanced Navigation Spatial Dual GNSS-INS in their RN50 UAV-LiDAR units and were very pleased with the results and reliability. With the RN80 UAV-LiDAR, however, Nextcore wanted to try an improve the navigation system to suit the performance challenges of operating at altitudes over 50% higher than their previous system.
After testing and evaluating various INS’s from different manufacturers, Nexcore coupled its LiDAR with the Advanced Navigation MEMs-based Certus Evo GNSS-INS, which provides near FOG performance and has a gyroscope drift rate (bias instability) of 0.2 degrees per hour. This combination yielded exceptional results that allowed them to vastly extend the altitude ceiling to 120 m whilst retaining consistent, accurate survey data.
Certus Evo was chosen because of:
- High accuracy, which became increasingly important in reducing angular errors introduced by higher altitude surveying.
- Easy integration into Nextcore’s existing systems and requiring no additional engineering over the previous Spatial Dual INS.
- Cost-effective and available in OEM format for payload minimization, allowing Nextcore to offer better value to customers.
“After doing some test flights, the Certus Evo met all of our requirements for the RN80 project. This allowed us to leverage off the Spatial Dual integration and apply the Certus Evo as a drop-in replacement for that system. It’s also a very cost-effective sensor and a competitively priced product.” comments Simmons.
Payload minimization was also a critical aspect for the INS, as surveyors are always seeking longer flying time. This can only be achieved with a lighter payload technology stack. The team used the ruggedized housing version of the Certus Evo for additional strength and weather resistance, whilst remaining an efficient payload setup.
“The industry is constantly seeking lighter payloads for longer flight times and to fit on smaller, safer UAVs. Regulatory restrictions challenge the industry to meet certain specifications and the same is true for UAV LiDAR. We hit a ceiling. We need to be able to improve on that, although what we’re achieving now is a real game changer.” Cox says.
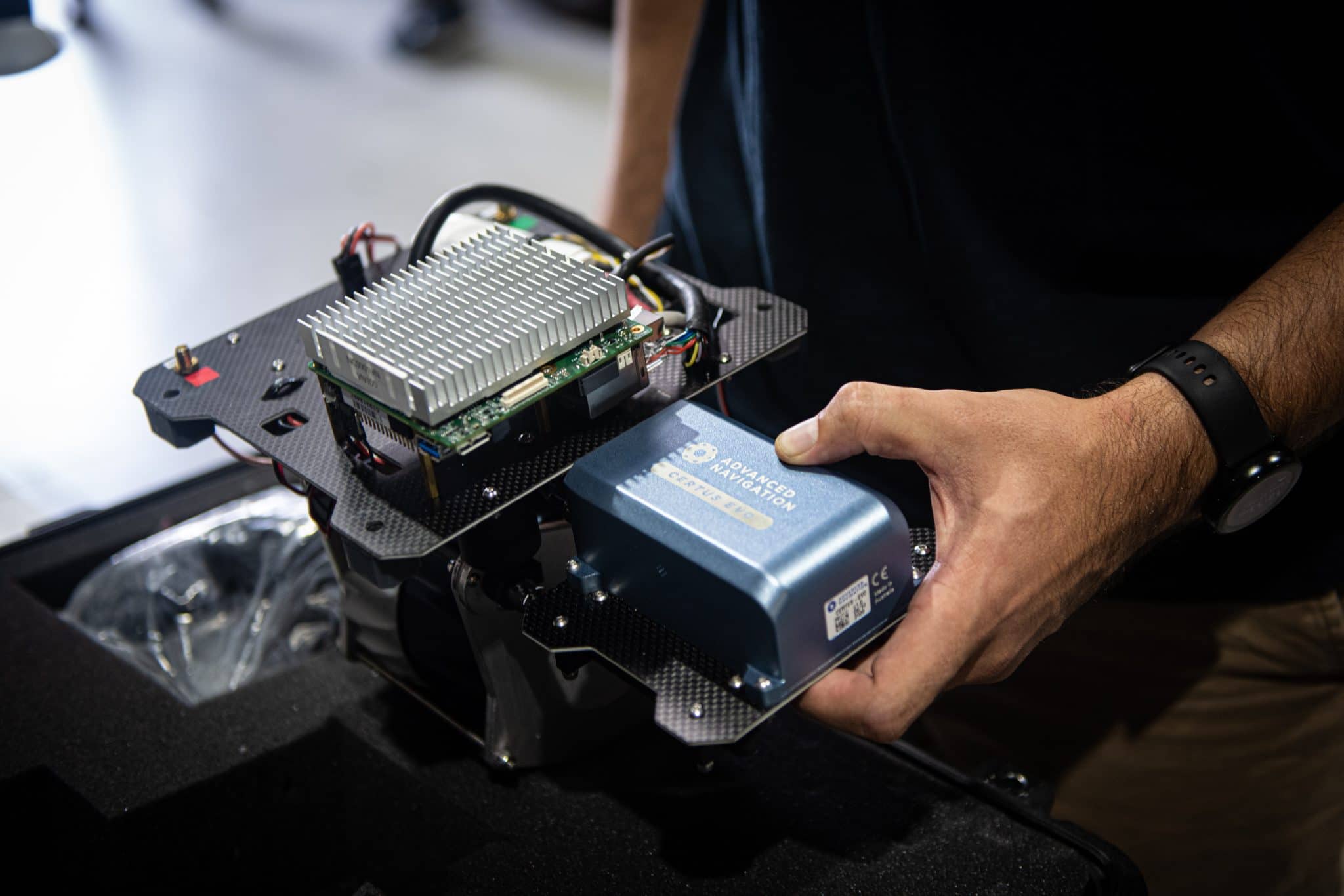
A closer look at the RN80 UAV payload, showing small form factor of the Certus Evo
The Result: Certus Evo Helps the RN80 Soar Above Expectations
“When we had done our calculations, we expected to be able to fly 80 meters above ground level.” says Cox. Instead, the Certus Evo performed so well it enabled Nextcore to produce a UAV-LiDAR that can deliver survey grade point cloud datasets at up to 120 m AGL. The 120 m altitude exceeded their initial goal by a further 50% and provides a solution that more than doubles the altitude of the previous RN50.
Higher altitudes tend to increase the LiDAR swath width. The typical swath width at ~50 m altitude is ~120 m, depending on actual altitude and resulting angle of incidence of LiDAR towards the edges of the swath. At 120 m, a reliable swath width of 180 m was achieved. This is a 50% increase over previous, equating to approximately 33% less flight-lines to survey a given area – a notable boost for productivity and efficiency to surveyors.

Image showing the effects of increased elevation on swath (survey width) and reduced potential of collision with vegetation and power lines
The Certus Evo equipped UAV-LiDAR then became the RN100. The RN100 allows Nextcore’s customers to fly far higher than previously and with increased safety, whilst surveying larger areas in the same flight times and achieving survey-grade outcomes.
The resulting survey material contains LiDAR point cloud data and the geo-referencing data from the INS. All data processing is performed post-flight to ensure the highest possible accuracy. PPK is used for correction of GNSS-INS position, roll, pitch, yaw and heading data. The processed INS data is then combined with the processed point cloud data to provide absolute position to the point cloud. This system realized consistent 30~40 mm precision at 120 m AGL. Nextcore has integrated the LiDAR and INS processing platforms to automate synthesis of data sets to reduce survey completion time. Depending on size and complexity, this solution can process survey data into a customer-ready 3D map within 30 minutes of mission completion.
“Integrating the Certus Evo into our product line has allowed us to offer a higher-end solution to our clients at a very affordable price. This has opened up new markets for us internationally and domestically.” concludes Simmons.

Certus Evo
Certus Evo is an AI-based MEMS GNSS-aided INS that provides extremely accurate position, velocity, acceleration and orientation under the most demanding conditions. It offers FOG-like performance combined with the reliability and affordability of MEMS sensors. It features low SWaP-C (Size, Weight, Power, and Cost), internal data logging, and multiple communication interfaces for easy integration. Certus Evo is available in both OEM and rugged packages and comes standard with licence-free 1 cm RTK position accuracy.