Tech Article
Published on:
The ocean remains one of the least understood territories on Earth, holding important resources and ecosystems that demand careful study to ensure their sustainability. Maritime intelligence is required for a variety of reasons, including underwater infrastructure inspections and environmental monitoring, and its significance is only increasing.
According to the latest statistics from the marine technology sector, there is now a growing demand for ocean exploration. By 2026, the industry is expected to grow from USD 415 million to USD 620 million, a compound annual growth rate (CAGR) of 6.9%.1
Navigating underwater, however, carries risks. Mistakes can lead to costly consequences and have irreversible environmental impacts. As we dive deeper and more regularly into the ocean, more advanced and precise navigational tools are needed.
Global Navigation Satellite Systems (GNSS) have long been crucial for accurate navigation on land and in the air. However, their signals do not penetrate water, making them unhelpful in the ocean. Subsea explorers have therefore had to rely on alternative tools for navigation.
Traditional underwater navigation tools, such as magnetic compasses and gyrocompasses, have been dependable solutions, but they can sometimes struggle with accuracy due to magnetic interference and secLat degradation at higher latitudes. To address these issues, Advanced Navigation has introduced the Subsonus acoustic compass. This innovative solution combines the accuracy of GNSS satellite signals with the reliability of underwater acoustic positioning to deliver precise positioning and heading underwater. As an added feature, Subsonus also includes an integrated inertial navigation system (INS), which measures acceleration and rotation to compensate for any drift or inaccuracies.
When underwater, the most important navigational output is heading. Accurate heading is what determines the direction of travel to ensure vessels can navigate to their intended destinations, safely and effectively. This is especially true when visibility is low and landmarks are non-existent.
In the absence of GNSS, alternative underwater navigation tools have been adopted, but they have limitations. Subsonus combines underwater acoustic positioning with GNSS signals for superior accuracy, without the constraints that other technologies present.
The Boreas A series by Advanced Navigation is a prime example of FOG technology, demonstrating the impressive, rapid north-seeking capabilities.
Advanced Navigation’s Subsonus is an acoustic positioning system that uses acoustic signals to determine both the heading and position of assets underwater, down to a depth of 1000 m (~3300 feet). Using acoustic heading transfer technology, GNSS heading can be transferred from the surface vessel to an asset underwater. As a result, underwater units can achieve high accuracy heading with or without a gyrocompass or magnetic compass.
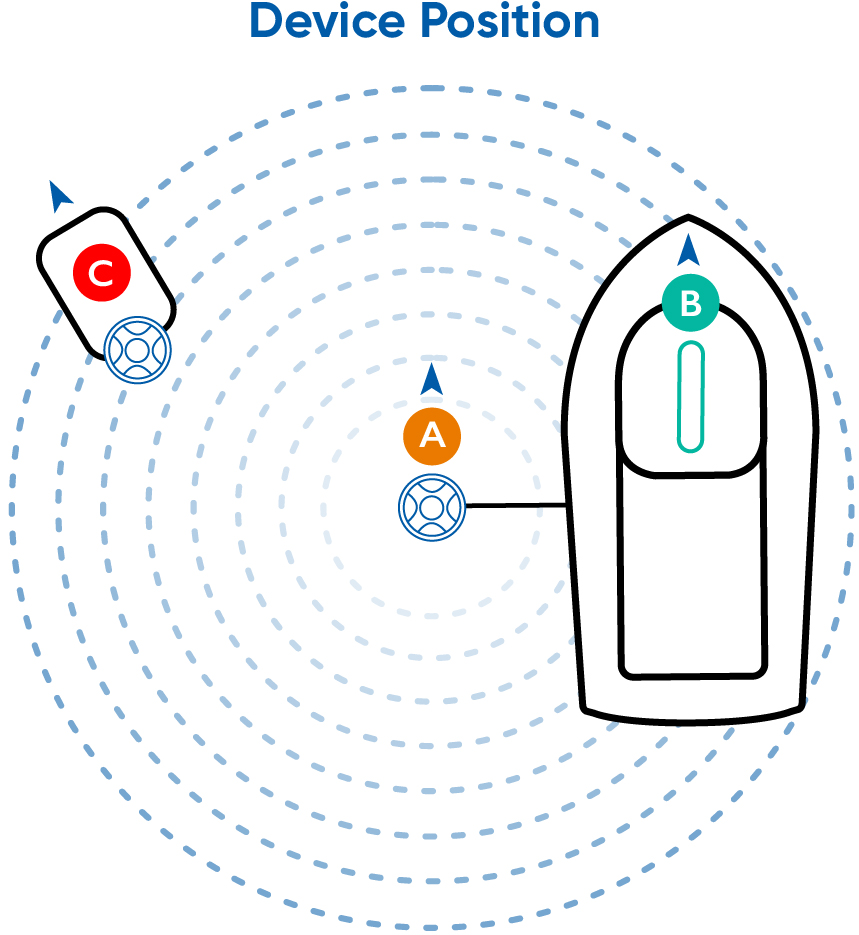
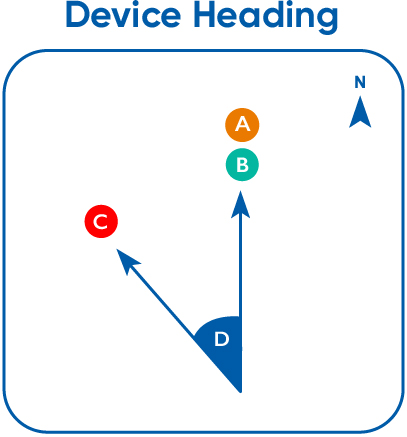
The graphic below also illustrates the setup described: a Subsonus unit (A) is mounted and aligned with the surface vessel, enabling it to obtain heading data from the mounted GNSS Compass (B).
A second Subsonus unit (C) attached to an underwater vehicle uses bi-directional USBL pings to determine the orientation offset (D) between the two units (i.e. between A and C).
Once the absolute heading and orientation offset (D) between the surface unit (A) and the underwater unit(C) are established, it is possible to determine the underwater unit’s own heading.
This technology enables reliable underwater navigation for a wide range of applications, including environmental monitoring, offshore energy inspections and infrastructure maintenance.
Compared with existing navigation solutions on the market, Subsonus offers several unique advantages:
Subsonus operates as an acoustic compass by integrating several advanced technologies to achieve its navigation capabilities. These include GNSS Compass, ultra-short baseline squared (USBL2), acoustically encoded data communication and an INS.
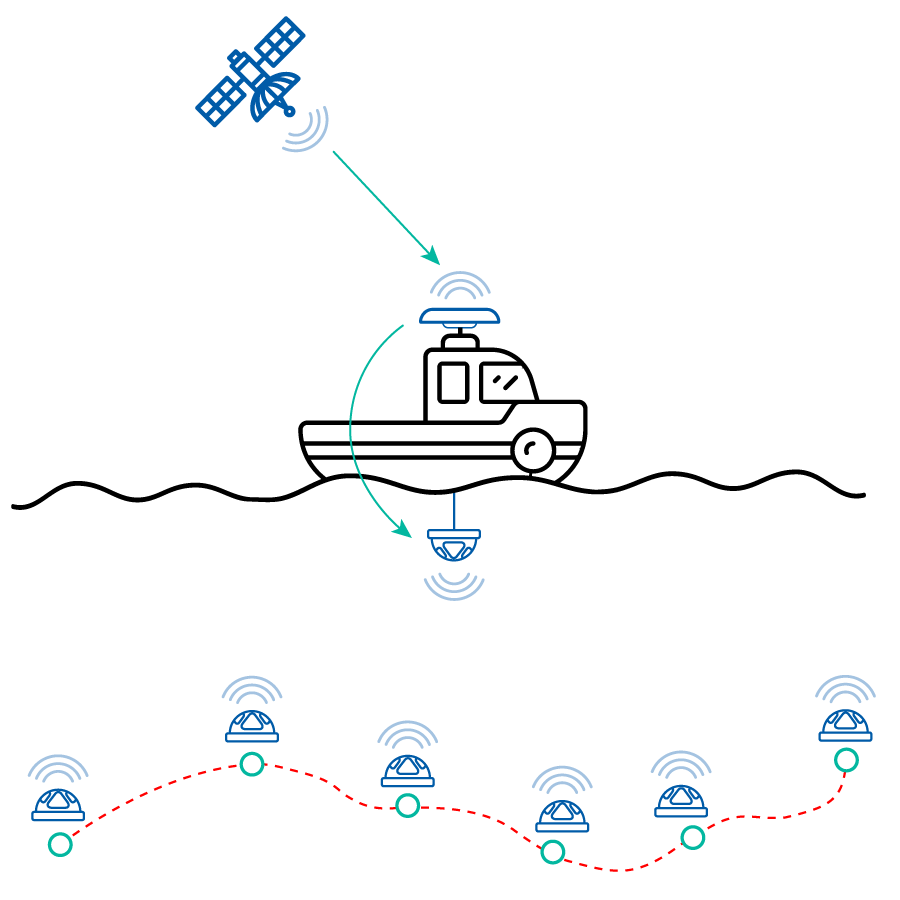
To enable the surface Subsonus to receive GNSS signals, it needs to be connected to a navigation and heading solution, such as Advanced Navigation’s GNSS Compass. This GNSS receiver utilizes signals from multiple satellites to calculate the position and heading of the surface Subsonus. By analyzing the signal travel times to each of the dual antennas, the GNSS Compass can triangulate the Subsonus’ location with exceptional accuracy.
The acoustic compass technology is driven by an innovative new USBL configuration termed USBL2. This configuration involves deploying Subsonus units on both the surface vessel and the underwater vehicle to establish a transducer-transducer setup. The underwater Subsonus is then updated with its absolute position and heading via acoustic data transfer from the surface vessel. By conducting USBL calculations on both the surface vessel Subsonus and underwater Subsonus, this configuration significantly reduces navigational uncertainty.
In simpler terms, the USBL connection between the two Subsonus units allows the underwater Subsonus position to be determined from the georeferenced position of the surface vessel Subsonus. This eliminates the need for costly subsea heading solutions, such as FOGs.
Furthermore, Subsonus USBL2 is not limited to just two transducers. It can integrate multiple submerged transducers (including transponders like Advanced Navigation’s (Subsonus Tag) into a unified system. With multiple Subsonus devices, each unit independently measures sound velocity, and the combined data results in highly accurate range estimates without requiring additional equipment such as sound velocity profilers.
A single Surface Subsonus unit can track a multitude of underwater assets using USBL2 technology.
In the past, underwater communication has been challenging due to complex equipment configurations and tethered data links. Subsonus overcomes these complexities by providing ranging and bearing information as well as noise rejection and filtering information via acoustic signals. These data packets are encoded seamlessly into the acoustic signals without affecting the primary USBL functions.
Subsonus also features an integrated INS that provides precise measurements of roll, pitch, heave and acceleration. The INS fuses Subsonus’s acoustic position and doppler velocity with factory calibrated inertial sensors and a depth sensor to achieve an optimal solution with accuracy far beyond that of a standalone acoustic positioning system.
Since each Subsonus unit can track its own movement and positional changes, multiple units can work together, communicating to share navigational information and determine their relative positions.
Subsonus stands out as a versatile and cost-effective solution for various subsea applications, delivering accurate navigation data even in challenging conditions. Its compact form factor allows for seamless integration into AUVs , ROVs and other underwater assets.
Case studies, such as JM Robotics’ successful integration of Subsonus in their HD3 ROV, provide tangible evidence of Subsonus’ effectiveness in enhancing navigation functions, reducing costs and mitigating risks.

20 May 2025
Go to Article
30 March 2025
Go to Article