Case Study

Published on:
DOF Subsea
DOF Subsea is an international subsea services organization. The company provides integrated project managed and engineered subsea solutions to the global offshore energy industry. The company offers services to energy producing regions around the world.
DOF Subsea employs more than 1200 subsea professionals, owns and operates a fleet of 25 vessels and over 71 ROVs and two AUVs. The DOF Group is a trusted and leading partner delivering services globally for a sustainable utlization of offshore energy and other subsea resources.
Much of the world’s current energy resources are buried beneath the seabed and must be acquired and transferred safely to the mainland for collection and processing. For gas and liquid resources, pipelines are often used to transfer the materials. The highly corrosive and volatile nature of marine environments creates a need for very regular and thorough inspections to ensure structural integrity of pipelines. Inspection and maintenance is critical to preventing possible environmental impacts from material leakage. Three main inspection points are; firstly, looking for “spanning” where the seabed beneath the pipe is eroded and the pipe is no longer adequately supported. Secondly, checking the condition of sacrificial anodes that prevent corrosion of the pipe material. Thirdly, checking the condition of protective coating on the pipes.
DOF Subsea provides regular pipeline GVI (general visual inspection) and maintenance services to clients all over the world. Depending on the actual environmental conditions and pipeline depth below water, be it 20 m or 2000 m, different vessels and inspection vehicles are used, as necessary. As the water becomes shallower or the environment more sensitive to larger vessels, complications arise in getting appropriately sized and maneuverable equipment into place. This can also be coupled to increasing change in client requirements in wanting to significantly reduce carbon emissions, expenditure, vessel and crew sizes.
In this case, the client requires liquid petroleum gas pipeline inspections off the coast of Western Australia. The coastal area where the pipelines run is approximately <10 to 15 m deep. Shallow water means that the objects and reef structures around the pipeline tract are again closer to the surface. This presents several initial problems in that the surface vessel must have an appropriately shallow draft to avoid collisions. For this, the project team chartered a suitable catamaran. Similarly, the ROV being used for inspection must also be small enough to navigate the environment safely. In many cases where the survey is conducted in more open water, ROVs may be 2 to 3 m long. Here, however, the ROV is approximately 1 m in length. A definitive factor for USBL positioning in such conditions is handling signal reflectivity due to proximity to seabed, submerged objects and surface reflections.
Another all-important requirement is that the position and heading of the ROV must be known for the purposes of mapping the absolute position of locations along the pipeline where maintenance is required. Although the ROV is piloted via a visual display for GVI, the position data is required as a reference for each anomaly. This data is used post-survey, when sending divers or other equipment to location to perform maintenance tasks. With many kilometers of pipeline in question, position accuracy is extremely important to the efficiency of operations. Gavin Wallace, Project Surveyor at DOF Subsea sums up a major challenge.
“We expect USBL positioning tolerances at this depth to be around 0.4 m. One of the main problems we have encountered previously on this project was noise associated with working in such shallow water. This threw conventional USBL systems positions out by up to 15 m.”
Gavin Wallace, Project Surveyor, DOF Subsea, Australia
To satisfy the environmental factors and reduce overall expenditure for clients, DOF Subsea needed a USBL that required minimum fuss to install to their ROV whilst providing better than sub-meter position accuracy.
“These days, what clients are looking for is not only reduced costs, but reducing crew numbers, vessel and fuel time, and carbon footprint. This is how DOF Subsea is going – smaller, even with the vessel. Clients want to do as much as possible remotely.”
Giovanni De Vita, Survey and Geomatics Lead, DOF Subsea, Australia
The requirements of using a small-scale ROV in shallow water made the option to use Subsonus highly viable. Some of this can be attributed to previously using far bulkier USBL navigation equipment that often led to extensive and expensive modifications to ROVs to fit. Depending on ROV size, this could impact on the operation of the ROV, its buoyancy and maneuverability, adding further complexity to solve. For a small-scale ROV, size of the USBL is critical.
“Subsonus was not only a new technology that we wanted to try, but it is the only USBL that we could find to fit onto an ROV of this size. In this case, smaller is definitely better for the outcomes we wanted to achieve.”
Comments De Vita

Subsonus is small enough to be held in hand
The unique USBL2 transducer architecture of the Subsonus provides several benefits, including:
Additionally, the 8-transducer array of the Subsonus USBL provides higher levels of position accuracy over traditional USBL arrays that contain fewer transducer elements. This offers a range of 150 ° either side of the boresight axis, so even above parallel USBL is possible in the right conditions. The high sensitivity and fine granularity of angular measurement from the Subsonus transducer architecture and integrated depth sensor helped overcome difficulties in precise position when dealing with acute slant range due to water shallowness and when attached to a more dynamic (smaller and more prone to water induced movement) vessels.
“At the shallowest section of our survey, the surface vessel had to remain on station at 5 m water depth while the ROV moved off, following the pipeline further towards the shore. Positioning remained accurate right up to the point we ran out of ROV tether.”
said Wallace
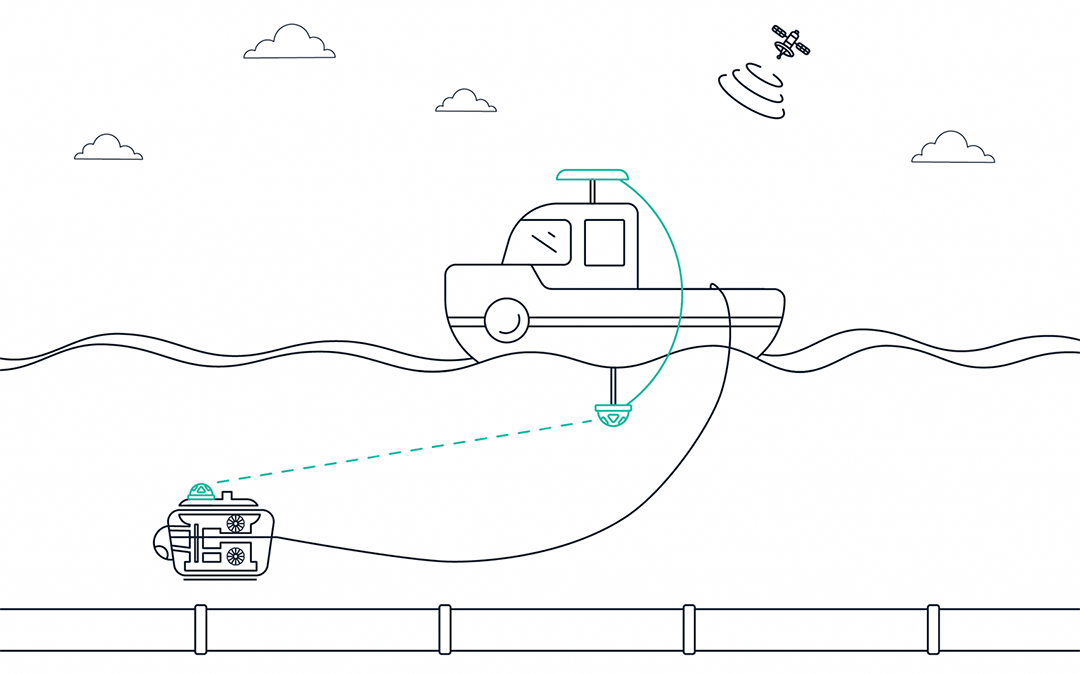
Image depicting acute slant range for USBL in shallow water conditions. The system used has a Subsonus mounted to the surface vessel hull and to the ROV. A GNSS Compass is mounted above deck to provide GNSS derived absolute position to the solution.
To gain higher accuracy and provide heading data for the pipeline survey, a Subsonus and GNSS Compass is attached to the surface vessel. This arrangement provides accurate GNSS based dual-antenna heading and acoustic position and heading data via USBL2 positioning between surface vessel and ROV (communications is handled using the ROV tether). The heading solution means a traditional subsea heading source such as a FOG is not required. This alone can potentially save thousands of dollars per survey. The system converges the time-stamped relative position/heading of the ROV to the absolute position/heading of the surface vessel to record the ROV georeference. Knowing the position of the ROV at all times is critical to not only the navigational data, but to safety. If the position of the ROV is lost, the possibility of crashing it or colliding with the surface vessel or pipelines increases hugely.
The direct connection between components and simple configuration made deployment of the GNSS antenna to USBL not only fast, but also simple and neat. The integrated INS in the Subsonus also meant freeing up the ROV of what used to be a separate piece of equipment.
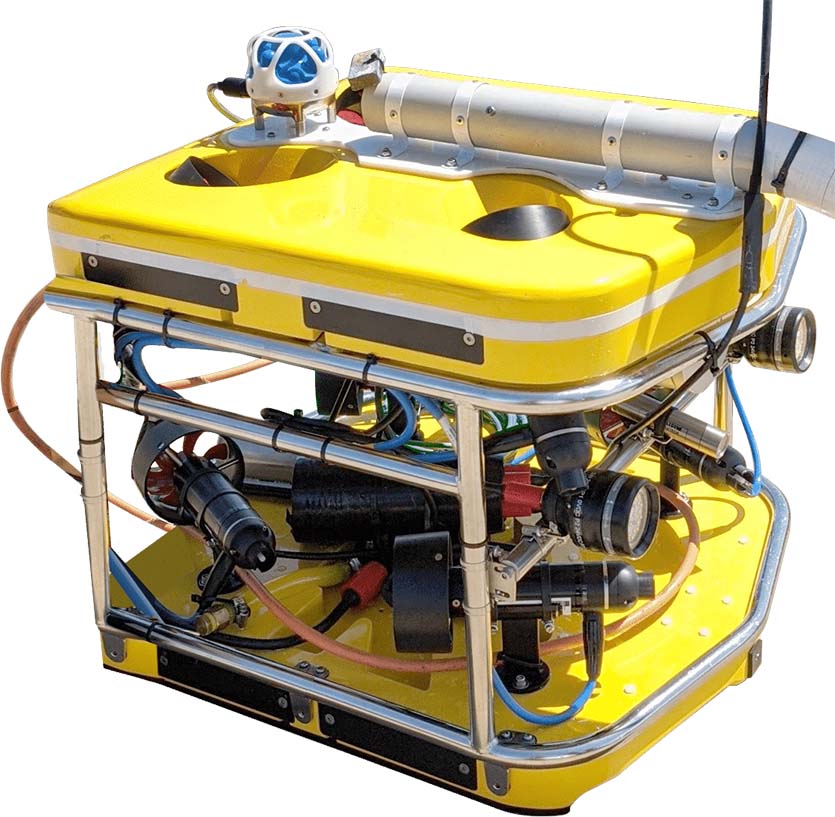
ROV with Subsonus attached
“Our previous equipment was in multiple modules that not only required individual transport, but also several power and data ports on the ROV. There are limitations to how much equipment can be carried and attached to an ROV, which is an important consideration for us. With Subsonus, the USBL and INS are integrated and require just one power and data connection. It also transports in a single case.”
said De Vita
The DOF Subsea team fitted a third-party DVL to the ROV to provide velocity and altitude above seafloor data into the Subsonus system. Velocity data from the DVL improves system accuracy particularly at longer distances where, due to decreasing slant angle, the accuracy of the USBL degrades. DVL provides relative positioning, which augments and enhances the absolute positioning data provided acoustically from the Subsonus. This improves precision, at distance, from potentially within several meters to under 0.5 m. Using a DVL is also critical in maintaining the vertical position of the ROV above the pipeline, for safety reasons. This integration not only provides a full survey navigation system, but negates requiring additional magnetic heading that will be affected by the steel pipeline. This solution also vastly reduces costs and complications if FOG heading were to be considered.
The team uses previous survey information in their software to create a map of the pipeline that is referenced to KPs, which are markers on the pipe at 1 km intervals. Using the KP and the X-Y coordinate data, the maintenance crews are able to view video taken by the ROV of the associated pipeline anomaly. This coupling between the ROV video and the estimated location is essential for rapidly locating and assessing anomalies and when sending crews and equipment to anomaly sites.
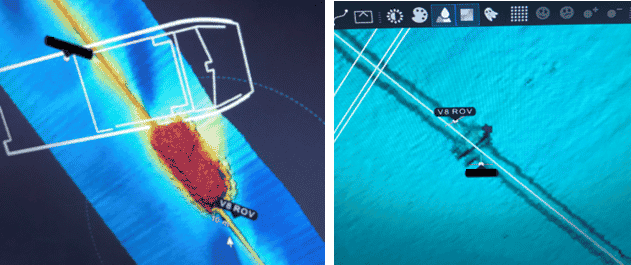
Example images from the pipeline survey system (images edited)
The pipeline survey team found that the Subsonus USBL configuration they used provided much of what they needed for USBL positioning on several levels. To meet the demands of using smaller scale vessels, crew and ROVs meant that Subsonus was the only device on the market capable of being used without extensive modification to the ROV. The full INS capability of the system and easy DVL input produced significant benefits to accuracy, precision and value of the survey to DOF Subsea’s customer. These factors make big differences to clients that, in general, are increasingly looking to reduce their costs and impacts on the environment. Notwithstanding, Subsonus helped DOF Subsea improve their survey results;
“Subsonus achieved the required positioning remarkably well and provided us much greater USBL positioning stability. Both myself and our client were highly impressed with the INS positioning over previous campaigns.”
commented Wallace
The simple configuration and easy deployment of the system not only reduced complexity of the integration, but provided an opportunity to speed up preparations for the surveying task. The Subsonus acoustic navigation performance, simple installation and minimal size provides several paths for DOF Subsea to help satisfy client needs, improve overall operating efficiency and generally scale down the size and cost of the operation.
“These days, for any offshore operations, being small, being easy to deploy and easy to manage are what clients are looking for. Subsonus helps us a lot in achieving this. We will definitely be looking more into this technology for other applications.”
concluded De Vita

Subsonus is a next-generation USBL underwater acoustic positioning system that provides high accuracy position, velocity, and heading at distances of up to 1000 metres. The system features an industry-leading calibrated hydrophone array combined with an internal tightly coupled INS, all packed into a miniature titanium enclosure small enough to fit in the palm of your hand.