Tech Article
Published on:
Peter Baker of Advanced Navigation shares some insights into the development and technology behind Hydrus – a micro hovering autonomous underwater vehicle (micro hovering AUV) that is revolutionizing the underwater drone industry.
Peter is interviewed here by US Major General (Ret) James Poss for Inside Unmanned Systems magazine at the 2022 AUVSI Xponential show, held in Orlando, Florida in April. The purpose of the show is to bring together leaders in the fields of autonomy, robotics, and uncrewed systems from around the world to showcase technology and share ideas.
Peter Baker is Senior Product Manager for Advanced Navigation’s subsea robotics and positioning technology. Peter has spent his career deeply involved with high-end underwater technology, with over a decade spent as a hydrographic surveyor working in nearly all roles in offshore surveying.
“The technology our teams work on is disrupting the subsea industry. I’m very fortunate to be able to bridge our incredible engineering talent with our customers, ensure our products and features have maximum value for our customers and solve real-world challenges.”
Peter Baker, Advanced Navigation
Having gained hands-on experience with a broad range of vessels, remotely-operated and autonomous platforms, Peter’s focus is now on technology development. His role at Advanced Navigation sees him interfacing with developers and users of subsea technology. Seeing both sides of the development cycle allows Peter to establish a clear direction for technology development in a way that will satisfy market demand and allow customers to integrate the latest innovations into their workflows.
Peter is based in Perth, Western Australia at Advanced Navigation’s subsea facility, and holds a Bachelor of Surveying, specializing in hydrography from the University of Otago, New Zealand, and a Masters of Business Administration from the University of Western Australia.
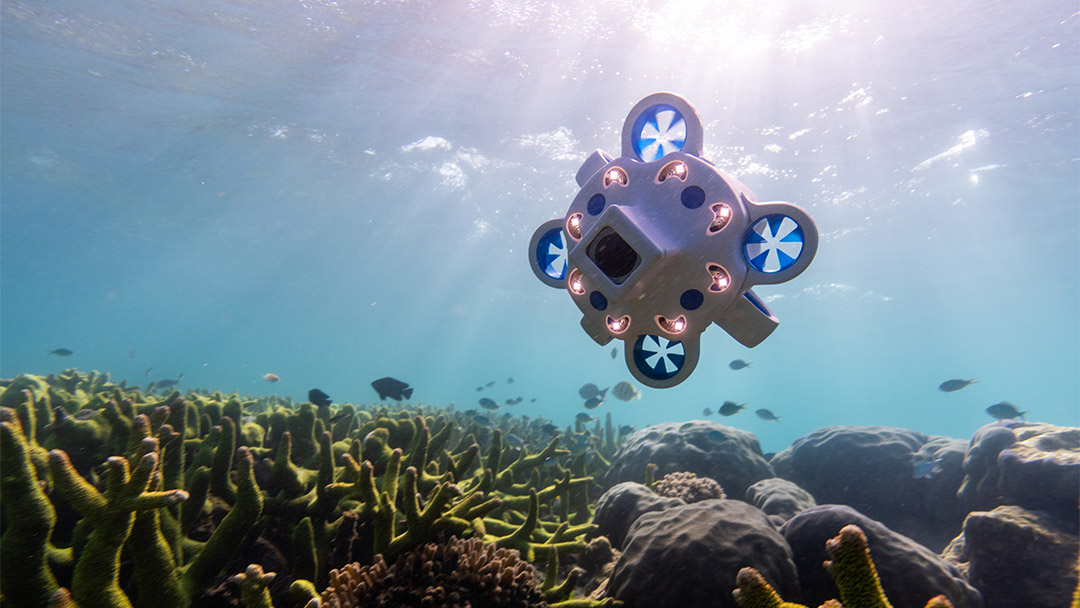
We are here to showcase our Hydrus micro hovering AUV, which is an underwater drone. Most of the drone industry is aerial-based, and over the last 10 to 15 years, we have witnessed what can be described as a drone revolution. This revolution transformed the aerial drone space from an industry that was weighed down by equipment that was expensive, complicated, difficult to use and required specialized operator training to equipment that is easy to deploy and use, requires no specialized skills, and no longer demands a huge budget.
This is the same in the subsea area, where robotic technology is big, expensive, very specialized and high maintenance. We recognized this and wanted to change perceptions and bring about a similar revolution underwater.



Most of the industry attention regarding autonomous and uncrewed systems remains geared toward aerial space. This is even though we have problems in both the consumer and commercial sectors for working in the ocean. How is your product able to change that?
Hydrus is fully autonomous, so no tether or human operator is needed. We wanted to make a robot that was portable – small enough to be carried on a plane and weighing no more than a few kilograms. Subsea presents unique challenges, including high levels of corrosion, pressure, no radio/GNSS and actually being able to position and navigate. This requires careful investigation of many different technologies.
We want users to be able to quickly plan a mission for where you want it to go and what you want it to do on a laptop or tablet and basically deploy the unit. We don’t need special vessels, lifting equipment or crews. It has to be easy enough for one person to use. To this end, it is not much bigger than a rugby ball.

Most of the time we expect autonomous operation. It is not tethered and the acoustic bandwidth is limited, so manual operation is limited. It will, however, provide ongoing feedback for mission status, refreshing position data, and notifications. You can also issue commands, such as pause mission and return to the boat.
Video and other data are logged on board, and you retrieve and post-process it after mission completion. Hydrus can run machine vision software, which can provide real-time reactivity or decisions that you can make part of the mission. It does this by analyzing video footage upon which one or more actions can be taken.
For example, we have used machine vision with Hydrus in the Great Barrier Reef off the coast of Australia to identify Crown of Thorns starfish, which are very destructive to the corals, and tag or record their locations.
Researchers use the data to track where the starfish are and their numbers. From this, they can take appropriate action to mitigate the adverse effects of the starfish on the reef.
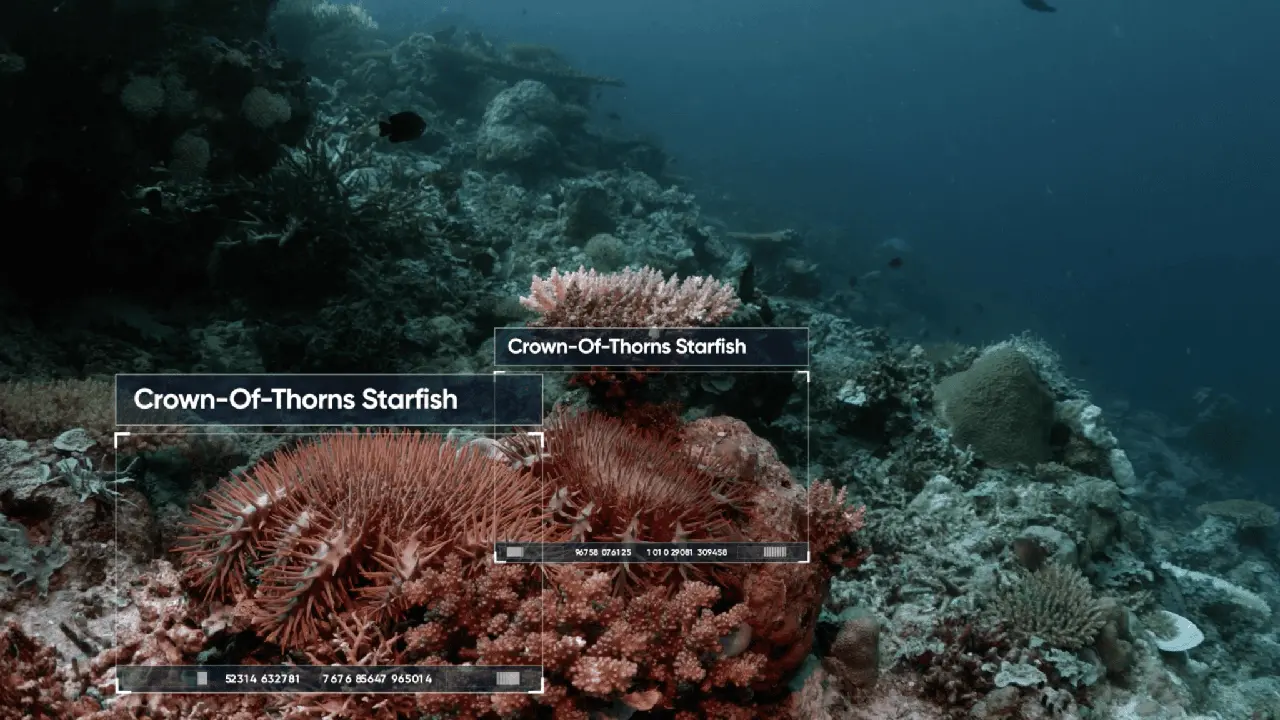
Hydrus Object Detection
For a keen fisherman like yourself, you could train your machine vision software to recognize fish of particular species. When the fish are detected, the robot can acoustically send a signal back to your boat and you can get the rod out.
Yes. The camera is not necessarily used for navigation due to water turbidity, particulate matter and lighting. It plays a role in navigation, however, it is primarily for visual data capture – images and video.
Absolutely. Hydrus can be used for search and salvage missions. Another example might be to check shipping lanes for debris and obstructions following a hurricane. Again this would be a simple task from a small boat and an easy way to restore confidence that the shipping lane is clear.
There are several sensor systems on board. One is a pressure sensor, and another is a conductivity sensor, which we can use together to calculate the velocity of sound in water as part of our navigation systems.
We also have the option to add third-party sensors; mainly for oceanographic purposes. For example, pH, methane, dissolved oxygen and so on. This data can be very useful in environmental surveys and research. Commercial purposes also, such as leak detection in oil and gas pipelines,
For things like side-scan sonar, this would be a separate system, however, with the in-built DVL, we can log the return echo data from each acoustic beam and use that to build a point cloud digital terrain model of the seabed. It’s not the same density, say, as some wide-area mapping multibeam systems, however, we are operating at quite close ranges and our system delivers good resolution and details for this.
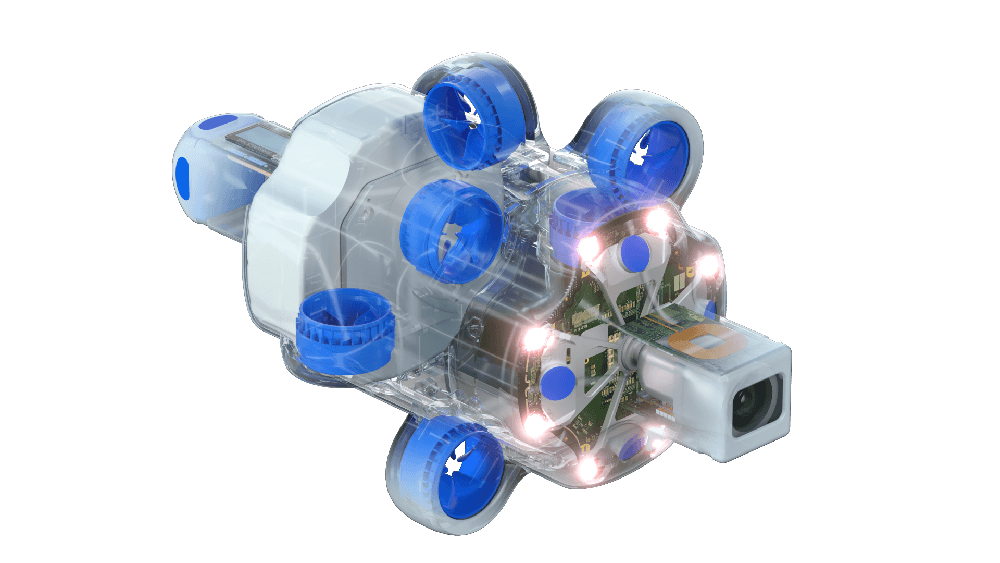
Unlike aerial drone applications, we do not have to fight gravity constantly. We have close to neutral buoyancy, and a single battery charge will last about three hours. Hydrus can dive to 300m which produces immense pressure, so all of the electronics must be fully encapsulated to prevent them from being crushed.
There is a single small pressure vessel within the vehicle, which is to protect the camera and this is also sealed from the surrounding water pressure by a ground sapphire lens.
The batteries are Li-ion and, to preserve hull integrity, we use wireless charging. This means that there are no connectors on the Hydrus, which are inevitably a major point of failure.
We have customers using Hydrus in a very wide variety of applications. For example, environmental researchers are using it to map areas of seabed and monitor marine habitats and collect data on growth and change in coral reefs, water conditions and temperature and so on.
More commercially, off-shore windfarms are a growing industry and because these are constructed in areas of high wind, the windmill platforms, sacrificial anodes, cable connections and footings, for example, need to be regularly inspected. The large-scale inspection of hundreds or more of these windmills is a great case for automation and robotics. Having human operators manually control ROVs is not efficient – you want this happening automatically.
This is a type of application that we designed Hydrus for. To leverage its ability to be fully autonomous and repeat missions and deliver mission data back without requiring ongoing human interaction is the goal here. The robots would effectively be resident to the windfarm and, say, once a week perform inspections then deliver the data back to the base and recharge via the docking stations. Furthermore, if you require a robot to perform some other mission, you simply send the mission to the required unit.
We have some special techniques to handle algal growth and similar problems. One includes using special materials that deter the attachment and growth of marine life forms, however, they are environmentally friendly as in there is no leeching or harmful emissions.
The mission usually will have a set waypoint for retrieval or the boat itself. If it is a specific location, once there it will hold station. To assist in retrieval, the robot has lighting and an onboard GNSS receiver that can help navigate to the exact pickup point.
We sell the Hydrus as individual products. This could be to commercial operators, sub-contractors and end users. We also back our sales with full support to ensure that every customer, regardless of purpose, has every chance of success. The main thing is that once launched, the robot must come back and, for purchases new to subsea robotics, we have support staff on hand to assist wherever required.
We see a massive need for an AUV like Hydrus, in a huge number of applications. To meet this demand we have completed a dedicated production facility to dramatically scale the number of units we can produce.
Our design and manufacturing are fully in-house, so we can maximize gains made available through vertical integrations and purposefully design deeply integrated and coupled subsystems.
When you compare the logistics costs of hiring vessels and crew and renting specialized equipment, the cost of a Hydrus unit will very quickly pay for itself. We want to open subsea survey, research and exploration to a much broader user base and so this means building something that is not only autonomous but remains extremely versatile and affordable.
Hydrus is a step change in underwater robotics that represents a confluence of technologies. To be brief, we are using battery tech, on-board AI, and sophisticated navigation and propulsion systems that will bring what we have seen in the aerial drone revolution into underwater space.

20 May 2025
Go to Article
30 March 2025
Go to Article