
From Moon Landings to Earth Missions: A New Era of Navigation Begins with Laser-Aided Inertial Intelligence
Share:
Published on:
Advanced Navigation fuses inertial with laser-based velocity to achieve superior resilience across complex domains.
Global, May 2025 – Advanced Navigation, a global leader in autonomous systems and navigation technologies has successfully demonstrated a hybrid solution for long endurance GNSS-denied navigation, proving that a software-fused inertial-centered architecture is the defining standard for autonomy.
“The world is evolving, and navigation must evolve with it. GPS is disturbingly vulnerable to challenging environments, harsh weather conditions and cyberattacks with rising threats of jamming and spoofing. The question isn’t if GPS will fail, but when. Operators need to build resilience now.”
Shares Advanced Navigation CEO and co-founder, Chris Shaw.
“This hybrid solution is designed with adaptability and reliability in mind. While others focus on individual components, Advanced Navigation champions a layered, inertial-centered, multi-sensor architecture, fused together by intelligent software. This approach can be updated or modified to adapt to harsh environments and mission requirements.”
A New Era of Navigation Resilience
This advancement is achieved by integrating a strategic-grade fiber-optic gyroscope (FOG) inertial navigation system (INS) with a new class of navigation aid: a Laser Velocity Sensor (LVS). The result is a fused hybrid architecture that delivers unprecedented precision and reliability in even the most challenging environments.
At the center of every reliable navigation platform is a trusted source of truth: the INS. Advanced Navigation’s FOG INS, which is sensitive enough to detect the Earth’s rotation, provides that foundation by delivering precise attitude. Complementing this, Advanced Navigation’s LVS uses infrared lasers to measure a vehicle’s ground-relative 3D velocity with exceptional accuracy and long-term stability. Unlike conventional sensors, LVS performs reliably on both ground and airborne platforms, as long as it maintains a clear line of sight to the ground or a stationary surface.
Beyond its role as a velocity aid, LVS also enhances navigation resilience by detecting GNSS spoofing. By comparing its independent velocity measurements against GNSS-derived velocity, LVS adds an extra layer of security to Assured Positioning, Navigation, and Timing (APNT) strategies.
AdNav OS Fusion draws on sophisticated algorithms to interpret and filter sensor data. The software is designed to dynamically weigh the input from each sensor, adjusting in real time based on reliability scores, environmental conditions, and operational context. This ensures continuous, high-confidence state estimation even when signals are lost, degraded, or distorted. This inertial-centered, multi-sensor approach delivers a step-change in GNSS-denied navigation performance, compared to traditional methods.
Proven Capabilities with Real World Data
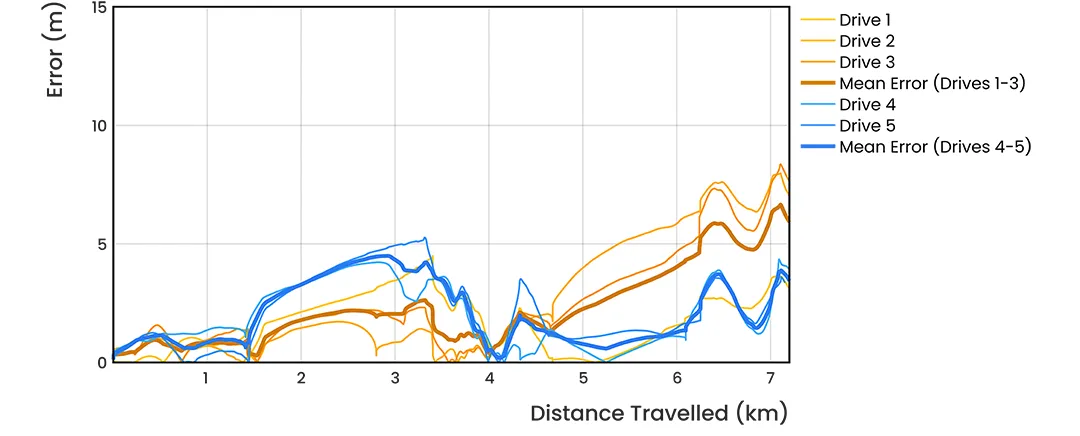
To validate the accuracy and resilience of the LVS Hybrid system, Advanced Navigation conducted a series of rigorous real-world driving tests. Across five trials, the system delivered exceptional performance with an average error per distance traveled of 0.053% compared to a GNSS (Global Navigation Satellite System) reference.
At the starting point, GNSS on the INS was disabled in the state estimation process, forcing the system into dead-reckoning mode. RTK GNSS was logged separately as a reference. This approach allows for a direct comparison between the computed dead-reckoning solution and a trusted position reference.
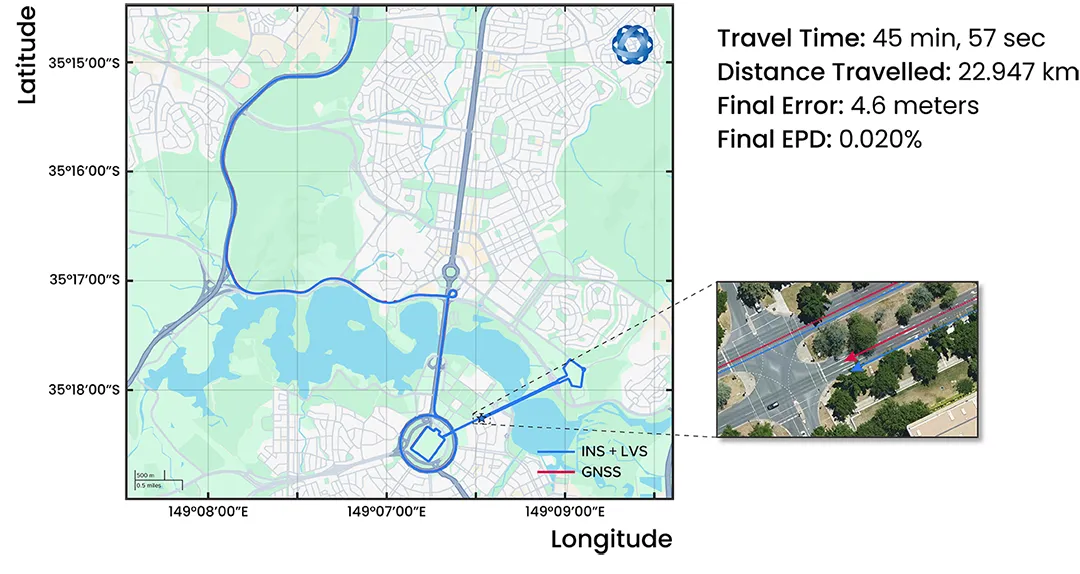
The below data shows dead-reckoning results from a 23 km drive around Canberra, Australia. GNSS was not used at any point in the drive for heading or position. RTK GNSS is shown as the red line, while the Hybrid system’s result is shown in blue.
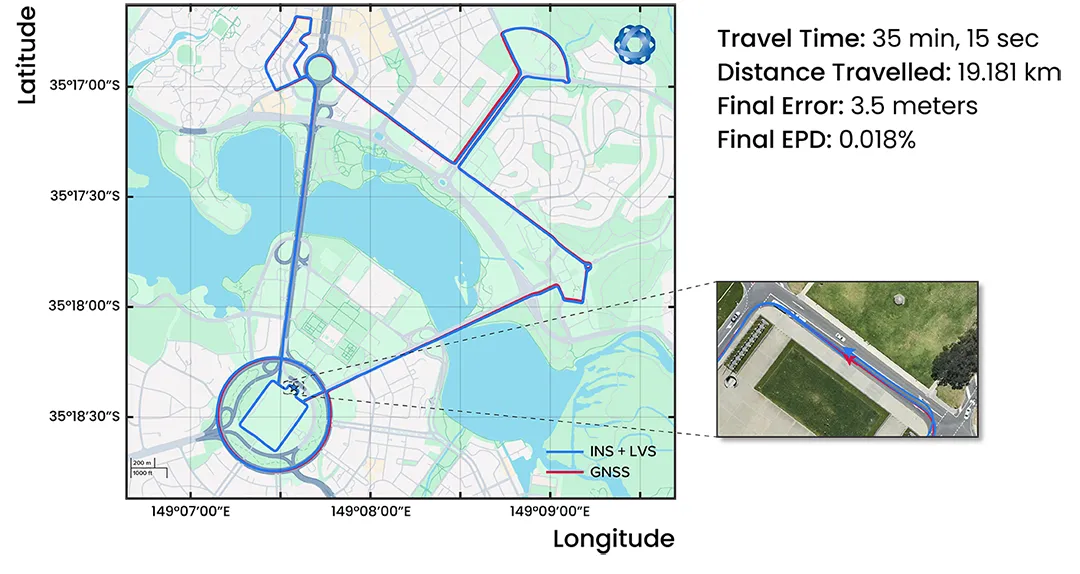
The below results are from a 19.2 km drive around the Parliamentary Triangle in Canberra, Australia. GNSS was not used at any point in the drive for heading or position. RTK GNSS is shown as the red line, while the Hybrid system’s result is shown in blue.
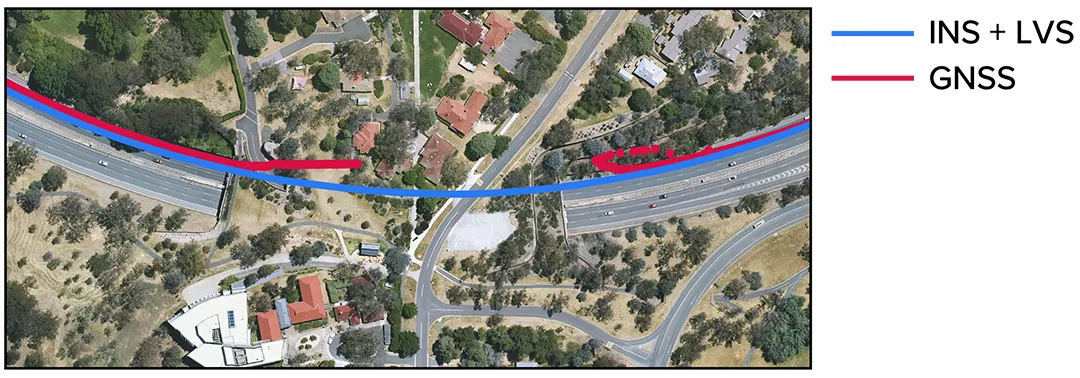
The figure below is a zoomed section from the first test drive, showing GNSS (red) drop out as the test vehicle drove through a tunnel, which completely denied the GNSS reference measurement. The Hybrid system’s result can be seen in blue, showing it did not suffer from this error.
These drives were done repeatedly, demonstrating consistent and reliable results each time.
The Hybrid system was also tested on a fixed-wing aircraft combined with a tactical-grade INS, demonstrating a final error per distance traveled of 0.045% over the course of a low-altitude flight over 545 km. These results demonstrate the system’s impressive ability to improve navigation performance of the INS in GNSS-denied or contested scenarios. For a more in-depth look into the technology, a white paper can be read here.
Commercializing Space to Earth
LVS is a terrestrial adaptation of LUNA (Laser Unit for Navigation Aid), a space-grade navigation technology developed for autonomous lunar landings. LUNA enables reliable navigation in the harsh environment of space by providing precise three-dimensional velocity and altitude information relative to the Moon’s surface. The result of several years of R&D, LUNA is set to be demonstrated aboard Intuitive Machines’ Nova-C lander as part of NASA’s Commercial Lunar Payload Services (CLPS) program.
By leveraging the engineering insights gained from LUNA, LVS adapts space technology into an Earth-ready solution for terrestrial GNSS-denied navigation.
What This Means For the Future of Navigation
In today’s dynamic operational environments, relying on a single sensor technology (such as GNSS or IMU) is no longer viable. Missions increasingly take place in GNSS-denied, electromagnetically noisy, and physically complex settings where traditional systems falter.
Robust navigation demands a layered, inertial-first and multi-sensor architecture – held together by intelligent software – that can adapt and scale to meet the unique demands of each mission. Embracing a software-defined nature, Advanced Navigation’s architecture means updates and enhancements can be deployed with minimal hardware disruption. This paradigm shift ensures truly resilient navigation for critical applications across defense, aerospace, robotics and autonomous systems.
About Advanced Navigation
Advanced Navigation is a global leader in navigation and autonomous systems. By leveraging capabilities in software-enhanced hardware, every solution delivers unrivaled capabilities and exceptional performance across land, air, sea and space applications where GPS is unreliable. Made possible with extensive research, testing and vertically integrated manufacturing, the company has progressed into deep technology fields, including robotics, inertial, photonic and quantum sensing, artificial intelligence, underwater acoustics, and GPS antennas and receivers. Customers choose Advanced Navigation for rapid product delivery and unmatched technical field expertise. Headquartered in Sydney, Australia, with research and production facilities nationwide and offices globally. Advanced Navigation is an Australian manufacturer exporting worldwide. #JoinTheAutonomyRevolution