USBL-Squared
What is the definition of USBL-squared?
A multi-transducer USBL configuration, unique to Advanced Navigation, that enables greatly improved underwater asset tracking, navigation and heading data than other USBL configurations.
Read the full article “Untangling USBL – comparing the benefits of USBL-squared (USBL2) with classic and inverted USBL“.
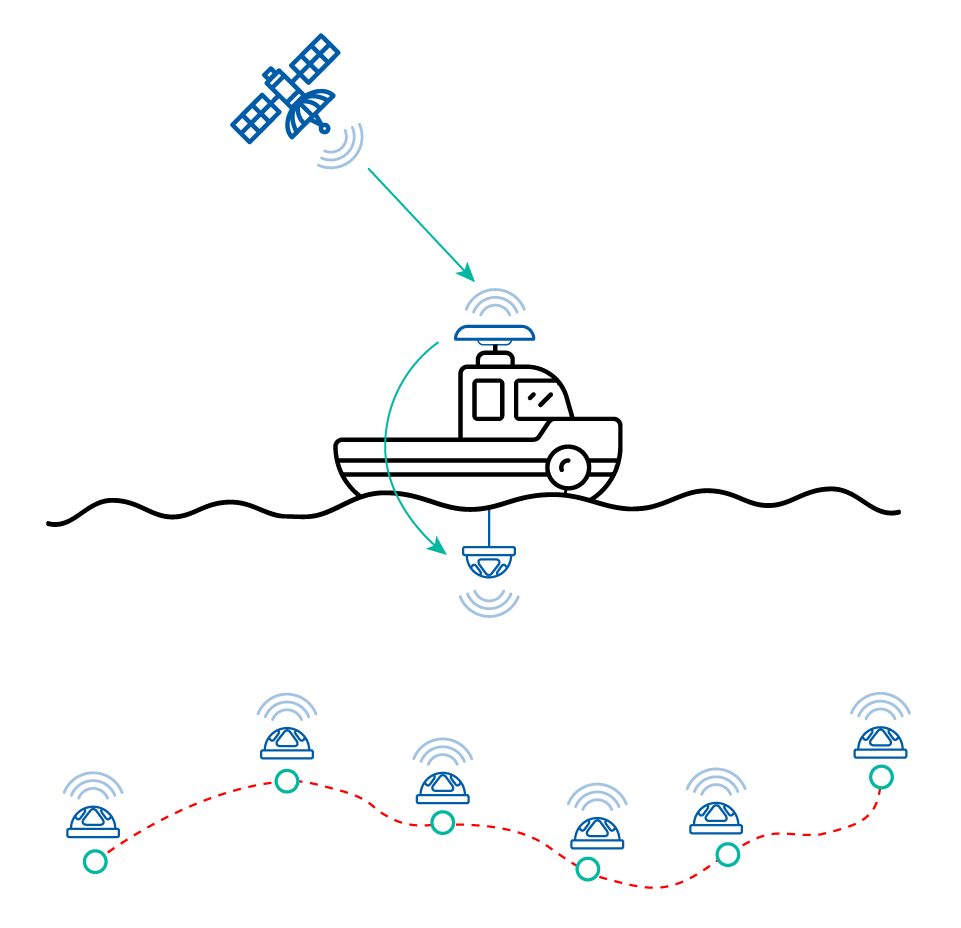
Image depicting Subsonus USBL2 operation, where the surface vessel Subsonus transducer is connected to a satellite compass for GNSS derived absolute position and heading input.
- Location of the remote Subsonus is attained acoustically, then resolved to absolute position and heading, which is then shared with the remote Subsonus.
- Navigation data is constantly exchanged between the Subsonus units to maintain the highest accuracy and precision possible.
- Position is attained at each ping, however, full motion data between pings is being logged.
In the example, the green circles are the pings, the red line is the logged path of motion. Heading of the tracked object is derived through USBL calculations being made at both surface vessel and tracked object without the need for additional hardware, such as a FOG.