Webinar

Published on:
On 30 June 2022 Advanced Navigation ran the webinar “The Future of Underwater Drones” with Peter Baker (Subsea Product Manager) and Morgan McDermont (Subsea R&D Manager). The hosts discussed how Hydrus is disrupting the Autonomous Underwater Vehicle (AUV) industry by making fully autonomous underwater survey, inspection and data capture more affordable, simpler and smarter.
Peter and Morgan also took attendees through the whole product journey, from inspiration and design philosophy to technical challenges and innovative capabilities. Finally, they showcased real-world underwater drone projects where Hydrus is already being used.
Due to the high success of this webinar with over 300 registrations from all around the world, we are making the recording available.
While it is possible to perform command and control via the optical modem, its primary purpose is for high speed offloading of payload data, and uploading of new mission parameters.
Launch is typically performed by hand, whether it is from a vessel, or from the shore. Recovery is performed with Hydrus holding station on the surface at a predetermined location (either absolute position, or relative to a set offset from the vessel), with a net being used for final onboarding.
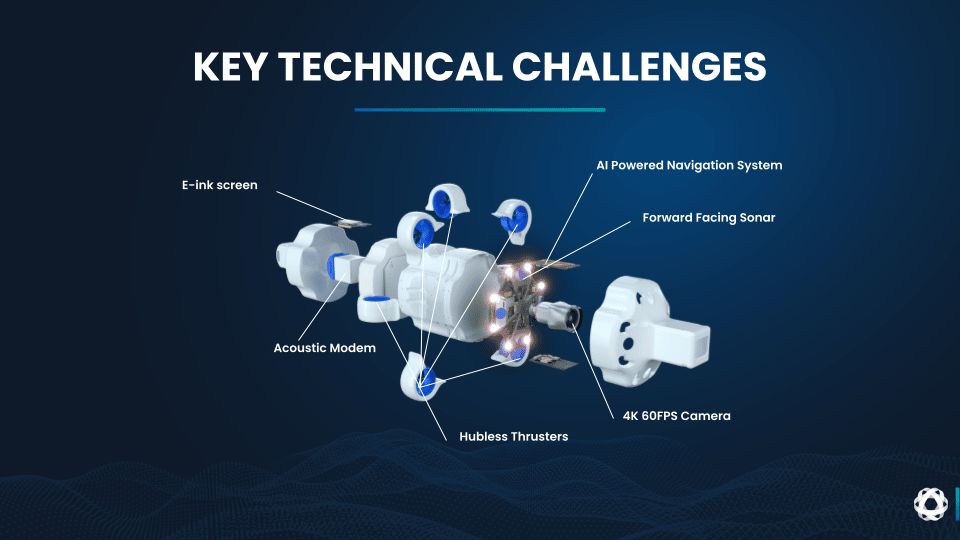
This current version of Hydrus does not carry an imaging sonar, however this may be a consideration for future designs.
Hydrus can currently dive to 300m with a total range of 3 kilometers, and a max transit speed of 2 knots.
The camera system onboard is capable of shooting 12MP still images, and 4K 60fps video, simultaneously.
Mission status and vehicle health data is communicated to the surface via the Subsonus USBL acoustic modem. Payload data, such as images and video, can be offloaded subsea via the optical modem. Final data transfer is completed using wifi once Hydrus has completed its mission.
The image sensor is optimized for low-light conditions in the visible spectrum.
The primary data collected by Hydrus is video and still images (at up to 4K 60fps, and 12MP). Hydrus also collects bathymetry data derived from the acoustic transducers in its DVL system. Additionally, oceanographic data such as temperature, conductivity and density are collected. Hydrus has many applications for work on reef systems.
The endurance is 3 hours. The battery capacity is 100 Wh and the battery charging time is 1.5 h. The battery charge standard is Qi inductive charging.
Hydrus can be purchased as a stand-alone unit, however a typical kit comes with a charging kit and transit case. A standard evaluation kit also includes and Advanced Navigation Subsonus USBL and GNSS Compass.
We are planning additional webinars where we will do a deep-dive into the data side of Hydrus and discuss use cases with customers who have field experience with Hydrus.
Acoustic point cloud data can be collected from the DVL system, and 3D mesh models can be derived using structure from motion (SfM) photogrammetry. We will be releasing a data pack that shows indicative data quality of these systems.
Subsonus USBL is used to acoustically track Hydrus while it is in the water, and act as an acoustic modem, to communicate with Hydrus – at the same time as the tracking is occurring.
Hydrus has a development roadmap that will allow future versions to meet our customer needs.
Regarding the price-range, our sales team will get in touch with you for a quote.
5 knots is outside of Hydrus standard working conditions. Hydrus works well in limited visibility as it uses both acoustic and optical sensors.
It certainly will and it’s important for an AUV that the customer can change it. With Hydrus you can quickly reconfigure the vehicle. It will change its neutral buoyancy, and that way you can have it working fresh or salt water. So if you are leasing out the system, you have to move between lakes, rivers etc, it is really easy to change on the vehicle.
That opens up reservoir inspections, where we have different densities of water layers. Even within oceans, going from one part of the world to another, you will have different densities of the water. We have the ability to trim the vehicle and we make sure we are always having the right buoyancy level for the vehicle despite changing conditions.
Yes, it is. We have Hydrus doing mooring chain inspections at the moment. It not only has the ability to look at the chain but what it can do is actually go down and look at the anchor. This is a challenge for a lot of vessels, even larger rigs and platforms, to make sure that when they put their anchors, they are actually dug into the sea bed properly. So, in this scenario, we have customers deploying Hydrus to actually inspect around the anchor and then survey back up the mooring chain and be recovered to the vessel.
This gives them peace of mind and confidence that they are secured more to the sea bed and their chains are doing exactly what they expect.
No, it’s not. The small size of the battery meant we were able to have it UN38 compliant – this is what you need for your phone or anything else to be able to just take it on the aircraft. It makes transport simple, as you said, put it in a backpack and go. Because of the certification built into the product, you don’t have any hassles of the airport and that takes a lot of the stress out of it.
A lot of larger autonomous vehicle systems are battery powered and it’s a growing issue how you can deal with restricted shipping. I can see why this is a question that a lot of customers are going to have.

Peter Baker, Subsea Product Manager at Advanced Navigation
Peter Baker is Product Manager for Advanced Navigation’s subsea robotics and positioning technology. Peter has spent his career deeply involved with high-end underwater technology, with over a decade spent as a hydrographic surveyor working in nearly all roles of offshore surveying.
Having gained hands-on experience with a broad range of vessel, remotely-operated and autonomous platforms, Peter’s focus is now on technology development. His role at Advanced Navigation sees him interfacing with developers and users of subsea technology. Seeing both sides of the development cycle allows Peter to establish a clear direction for technology development in a way that will satisfy market demand and allow customers to integrate the latest innovations into their workflows.
Peter is based in Perth, Western Australia at Advanced Navigation’s subsea facility, and holds a Bachelor of Surveying, specializing in hydrography from the University of Otago, New Zealand, and a Masters of Business Administration from the University of Western Australia.
Morgan McDermont, Subsea R&D Manager at Advanced Navigation
Morgan McDermont is the Subsea R&D Manager at Advanced Navigation’s facility in Perth, Western Australia. He has a keen interest in ocean restoration technology and leads the design team behind the Hydrus micro hovering AUV product.
Morgan holds a Bachelor of Mechatronic Engineering with honors from the University of Western Australia and draws on two decades of experience in autonomous robotic systems design across subsea, airborne and agricultural domains. During his eight years with Advanced Navigation he has driven the development of the Subsonus family of acoustic navigation, communication and sensing instruments.
Morgan’s passion for scuba diving and electronics design allows him to take part in field testing Advanced Navigation’s new technologies while driving innovative design for the next generation of subsea robotic products.
[00:00:00] Peter: Welcome everyone to the Advanced Navigation webinar series. Today we are going to be talking about the future of underwater drones, focusing on Hydrus, our micro hovering AUV. This will be the first in a series of webinars for Hydrus. This first one will concentrate on the inspiration and the design of Hydrus, and of thoughts and philosophy that went into the actual design and some of the key features and applications of the vehicle.
Later webinars will highlight customer use cases and applications, and we will dive into the data that is produced by Hydrus.
Agenda
Just a quick run through the agenda so everyone knows what we are talking about today.
[00:04:25] Peter: We are a global company headquartered in Sydney, Australia and with several facilities dotted around Australia, including our Perth facility, which is the Hydrus headquarters. We have a sales and support team all over the world and they are supporting over 1000 customers and 35000 navigation solutions deployed in the field across more than 70 countries. Our mission is to be the catalyst of the autonomy revolution.
At the core of Advanced Navigation is our AI based algorithm. This is based on our founder, Xavier Orr’s research and what this relies on is taking neural networks (AI style technology) and displacing classical Kalman filters in navigation solutions. What this does, results in improvements in accuracy up to 10x and up to a 40% reduction in the size of the hardware. AI basis is the backbone of the company and from there we have our various different applications, including cloud platform technology, underwater positioning and acoustics, and robotics and photonics as well.
[00:06:01] Morgan: I think Advanced Navigation is positioned well to see some of the challenges of navigating across these different domains. If we look at those, we have got air, land, sea, and space. There is a common thread here, GNSS denied environments, which can make navigating pretty difficult. You have got to rely on a lot of different sources.

This is really an extreme operating environment: the harshness of space. There are actually quite a lot of similar design challenges for us [in subsea] to solve, as in space you have no traditional GNSS systems. You are using bespoke instruments to be able to aid your navigation source. In airborne applications, it would be fair to say that this is where the drone revolution started. What we are seeing here is a real trend to be smaller, smarter, more compact, and it is about making the technology available to more people.
So improvements in the size, the weight, the power are really big drivers. And what we are seeing is that these improvements actually are filtering in into a lot of the other sectors, and probably bringing most of the innovation we are seeing.
I think there is a general trend for increasing autonomy and probably a better acceptance from the industry, and a willingness to deploy these autonomous solutions. I guess that level of trust is steadily increasing.
Things are definitely moving slower here. We are seeing incremental changes, but it is mostly along the lines of integration improvements. We are not seeing any significant disruption in this sector. You could say the drone revolution really has not been seen underwater yet.
Some of these traditional vehicles have not really changed in the last 20 years, their size and the technology used. Unfortunately, neither has the complexity of operating these vehicles. I think Hydrus really starts to change that. Customers do not want to be dealing with really complex systems to get hold of data. We see Hydrus as the tool that will actually deliver the data that the people want. And it really is the start of the drone revolution.
[00:08:25] Peter: I think we can say it is based on our ability to work both with manufacturers of uncrewed and autonomous systems, as well as directly with the customers of navigation, positioning technologies and geospatial data. We have a deep understanding of the challenges that are facing the market.
This allows Advanced Navigation to respond in a unique way to these challenges and take some of the innovations that we see in solutions in one industry, whether it is space, air, land, sea and push them into new markets and deliver a rapid change.

Cloud Ground Control (www.cloudgroundcontrol.com) is a cloud-based platform that allows users to operate and stream video from hundreds of different systems, such as drones, at one time.
This is all based on a laptop or even a phone. This system centralizes the data that has been collected from the drones into one place, making analysis of the data very straightforward. It is an extremely scalable solution because of its cloud architecture. So as well as making the data collection more robust it also helps by automating the mission planning and the control side of things.

[00:10:02] Morgan: If we have a look at Subsonus, I would say it is one of our core acoustic products. It is actually five instruments in one:
All systems are pre-calibrated. This means that when the customer takes Subsonus out of the box, it all just works together. It has very powerful custom processing inside it and it uses an eight hydrophone receiving array. The signal processing we use is AI inspired that can give you very accurate positioning, even in acoustically noisy environments.
Subsonus has a novel feature, which is acoustic heading transfer. It can actually transfer heading to other products and this is a lot more accurate than the traditional magnetic heading that has been available on these smaller systems. Subsonus is really the core building block across the portfolio.
Subsonus Tag was our idea for a wireless battery transponder. The revolution with this, I would say, is its ease of use. We focused on the customer’s experience. It features:
All these products speak the same acoustic language underwater. You can track Subsonus Tag from your Subsonus and now you can also control Hydrus as well.
[00:12:05] Peter: Looking at these products and other product ranges within Advanced Navigation, including:
You can see these are all contributing factors that have fit into Hydrus and have had a heavy influence on the design and the overall manufacture and construction of the vehicle.

I will kick things off a little. When we were planning Hydrus, we had a very customer-centric view of the world, same as with our Subsonus Tag product.
We really wanted to make sure we put customers first and ensure that the product that we are designing is actually giving the customer value.
They want data. That is why they are conducting surveys or inspections but there are obvious challenges in getting it. Some of these challenges really are the capital expenditure side of purchasing or renting a robotic system. They are incredibly expensive for a traditional system, but not only that, you also have the operational expenditure side of things. The day rate involved in chartering a vessel, of course the bigger robotic system, the bigger boat you need, the bigger crane and winch, and then of course, more crew. So the cost really ramps up really aggressively as you have these larger and larger systems.
It is both the capital expenditure and the operational expenditure that are the major blockers to customers getting their hands on the data that they need. The result of that really is that the customers will not be doing the surveys as frequently as they would like to get that kind of granularity on what is happening underwater, or they won’t be doing the surveys at all because they are totally blocked from access to it.
[00:14:22] Morgan: I think something that has really made our drone successful is miniaturization, which is the key here.
If you can make a smaller and lighter vehicle, you reduce the amount of buoyancy that you need inside that vehicle to keep it mutually buoyant. That gives you a smaller overall shape and vehicle envelope, and that reduces your drag through the water. So your power consumption is lower. This increases efficiency that is going to give you a better battery life. The smaller battery gives you less buoyancy. This brings you back to the start, where you have a loop of optimization. This really meant for us that the best AUV that we could design, was the smallest AUV.

There are a lot of other roles and benefits if you can make the vehicle as compact as possible. So for example, you can reduce its interaction with waves and currents. This will give a better station holding capability when it is trying to point the camera at complex targets. It provides better control, which means the autopilot is not working hard to try and keep the vehicle in the right place. And what does the customer get? It is better and has clearer data. They can see what the payload is looking at and they are not suffering from vehicle movement they do not want.
Another spinoff is, if you make the vehicle smaller, the batteries are smaller and this means that we can have them fall within the flight safe limit. Being easy to transport around the world can be a real game changer for some customers because there are cost drivers if they are traveling frequently or they are responding to jobs. Dangerous goods are neither cheap nor fast.
[00:16:00] Peter: One of the cool things with it being flight safe – I have personally taken Hydrus on jobs where we have had a phone call where someone needs something inspected very quickly. I can literally put it in a backpack and jump on a plane. We go out, we get the data that day and then I am back home that night, just with Hydrus in a backpack. It is not really a system you would ever entertain with a traditional underwater robot.
[00:16:25] Morgan: Something else that has been important is the ease of use. And as you said, early in the days of the drone industry for airborne systems, you needed a whole team of operators. You would have engineers on standby. In some of my earlier roles, there would be six of us in a fully fitted transit van just to put a single drone in the air. So now this kind of equipment fits in a backpack.
[00:16:50] Peter: I have a quadcopter at home and my kids can fly the thing. And even a humble product manager like myself can fly a quadcopter.
[00:17:01] Morgan: I think another opportunity that we have taken has been how you handle six degrees of freedom – your omnidirectional movement of the vehicle. Airborne drone systems generally use gimbals that allow you to point the camera differently to the vehicle, however, we are in the subsea space and we are always striving to eliminate moving parts. Parts are a source of cost and complexity. We have to seal them at depth and ultimately they are a point of failure. So with Hydrus, we realized the best approach was actually to eliminate the gimbaling altogether and point the entire vehicle. I think this approach has been a big part of the design philosophy across the board, where less is more. It means that if you can remove these complex components and sources of failure that you remove your ability to fail.
A good parallel to draw here would be engineering out common problems – cables and connectors. A lot of the problems underwater are not different to the problems we are solving above the water. They are just harder to fix when they go wrong.
A classic failure example would be a phone. What is broken? The headphone jack or connector failed or the cable just adjacent to that connector? What has this done to the industry? Everyone has gone wireless, so the battery technologies improved. Bluetooth tech improved, and now wireless audio is basically standard on all mobile devices and from all manufacturers.
This is a trend that will keep going. Back in 2018, we actually went a step further when we created Subsonus Tag and we went to a fully wireless solution. It has no connectors at all, your power is only delivered wirelessly and therefore it has just got no chance to fail in that way. We took the success of what we have done with Subsonus Tag and we put it in Hydrus. Hydrus is totally wirelessly charged and has no connectors. It supports fast charging and you can even do it underwater. Most importantly, it has given us a vehicle that is more reliable. There is just no chance of connectors failing there.
[00:19:19] Peter: One of the cool things with this design philosophy is that we have received some recognition for the design that has gone into the Hydrus vehicle. Recently, Hydrus was shortlisted for the Designers Australia Award 2022 and, a little more in international recognition, was shortlisted in the Innovation category at the Indo-Pacific Maritime Exhibition 2022. It’s really rewarding for the team here to actually get recognition on both a local and international scale that acknowledges the thought that has gone into the design of the product.
[00:14:22] Morgan: I think something that has really made our drone successful is miniaturization, which is the key here.
The next thing that we are going to touch on is some of the technical challenges. What were the key challenges from a technical perspective that needed to be overcome to meet our goals? This is really talking around the integration and the optimization of a lot of the subsystems that went into the vehicle.
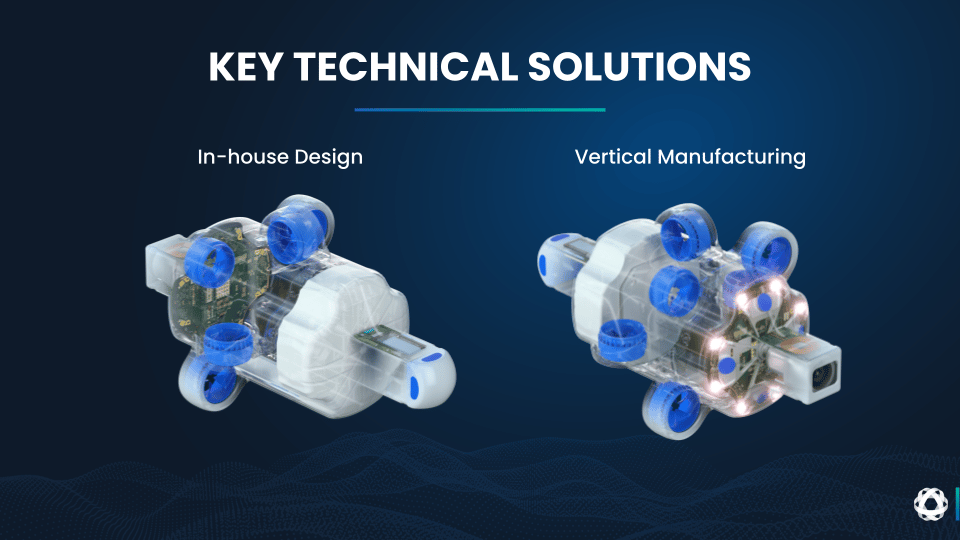
[00:20:21] Morgan: Given we are really pushing what we are looking for with the physical size and the overall cost of the vehicle, we found as we were assessing off-the-shelf technology that we are actually going to be better off to develop all the subsystems in-house.
This is always a bold strategy, but it is fair to say it has paid off because what it has given us is an opportunity to really work out how we are going to make them [the subsystems] sit well together. This has given us packaging that you just couldn’t achieve if you were using off-the-shelf components; it brought them together.
We already had experience with a lot of these subsystems at Advanced Navigation. We have USBL with Subsonus and acoustic communications from Subsonus Tag. We are experts in pressure rated batteries and displays, however, Hydrus obviously needed some extra systems so we had to produce:
[00:21:35] Peter: That covers the technical challenges from the subsystem side of things. But the other side to this is manufacturing. We can design incredibly complex and powerful systems, but building them in a manufacturable and scalable way is always going to present challenges.
[00:22:01] Morgan: I think it is fair to say it was a long road for us to achieve the level of integration that we have with Hydrus. When you are dealing with such a complex design, I think something that is really important early on is your ability to wrap up a prototype.
You have got to be able to revise these early designs really quickly and often, because you have got to reach an optimal design as quickly as possible. To do this, you need the right tools. We have our 3D printers that are just running constantly. You have got to get new concepts in there and be able to lower the barrier to being able to innovate. For us, it is really not just about the machines – we are really fortunate to have a diverse team, which gives us a lot of access to knowledge from quite a broad range of backgrounds; for example, huge cargo drones, competitive motor sport, critical systems – medical, defence, and games design – that has a big influence on the software that works with Hydrus.
I think this diversity of thought is really one of the critical ingredients that has allowed us to hit the level of innovation that we have with Hydrus.
That is looking at the team and talent. If we have a look at the process, from a manufacturing point of view, I think vertical integration is a general trend that we have seen, and this is spanning a lot of industries that are dealing with high technology and they are all benefiting. We have seen this from notebook computers, cars, reusable rockets – vertical integration is really quite important.
I would say that for sub-components, you have got to bring them together into a single assembly really quickly. Some processes, like moulding and sealing cannot just be on small components in the vehicle – they have to span whole parts of the product and be done in a single process. You can only do this kind of work in-house, in one building. You need your final assembly and testing to be co-located on the same line and you are going to need a lot of automation to make it possible.
Something else that is really important is having design engineers access the production floor. They have got to see where these things are being produced early to understand the challenges and to know the problems that they are designing out, right from the start. This is something that has served us well from the Subsonus Tag product. The manufacturing processes we developed for the hermetic seal, our designers have been able to really finesse those and improve them. So by the time we have put Hydrus into production, it has just been fantastic.
Something that has also been really important is seizing opportunities to delete parts. This can be physically removing parts or removing steps in the production. This allows you to get to, not just an optimal design, but a simple design, early. You can get that faster because anything that you do not have to make is definitely a speed up.
This is an approach that works and has been applied across all our products and the third generation here, with Hydrus, is definitely no exception.
[00:25:08] Peter: That is a great point about that tight relationship between our design team and the manufacturing and production team.
It lets us understand that when what might traditionally be separate parts of an organization come together and collaborate quite well, we can look for opportunities for those small gains that overall contribute to a much easier and simpler product to produce.
I think the comment I would make about vertical integration is it is really the only way to drastically reduce the unit cost of the vehicles. When you are manufacturing these super complex pieces of technology, whether that is autonomous unmanned vehicles or, in this case, underwater drones, you have to look to a totally automated vertical manufacturing line to bring that cost down.
We have talked about the miniaturization, but let’s get into some of the details on the unique capabilities of Hydrus. I know we spoke a little bit earlier about the fact that the subsystems are all built in-house, so you get greater capability and tighter integration than you would if you were looking at off-the-shelf components.
I think a great example of that is the Doppler velocity log (commonly called a DVL). These are well known within the industry as the go-to acoustic system for relative position aiding. They give the ability to calculate a vector of travel overground or through water based on the Doppler shift of these received acoustic waves.
Hydrus is actually doing a lot more than that with the data that it is getting from those acoustic waves. Morgan, do you want to jump in and let us know all of the things the Hydrus is actually doing with that data?
[00:26:51] Morgan: The DVL is the four blue pucks on the front of the vehicle. We are using it for both obstacle avoidance and also generating point clouds. Hydrus is a tiny, agile vehicle and we have designed the DVL to be a high frequency unit with a very high update rate (being a custom product, we can do that) has meant that it can generate surprisingly dense point cloud data, and with pinpoint accuracy. High frequency provides very narrow beams and as you sweep those beams across the sea floor with a quick moving vehicle, you actually can generate a lot of data very quickly.
Excellent models are your final output from it and you can generate these in quite complex environments. That is where we wanted the vehicle to work best – in those complex difficult environments where traditional vehicles fail. We are getting a lot of value out of an existing component that was essential for the navigation system and it’s now performing this dual function to generate a lot of really useful data.
Something else unique about how we have implemented the DVL is it is very tightly integrated with the camera system in Hydrus. Something that is also unique to Hydrus is that both the instruments are located on the same axis. The camera is actually in the centre of the DVL instrument, and what this means is that we can tightly integrate them.
The DVL will assist with setting the target distance for the camera, but it also gives us some opportunities for advanced filtering on how we match the visual data along with the navigation. You can, for example, detect and match static and floating features that the camera can pick up and then, with the DVL, match this to your water layer tracking data, as well as your tracking of the sea floor.
So this sensor fusion is really a perfect match because, you can bind the inherent drift of the DVL, which is what you get with these acoustic instruments, with the drift free and quite accurate data you get from the camera. In the event that you are in turbid conditions, or your lighting is not right, you have always got the reliability of your acoustic system, if the camera is not performing ideally.

[00:29:11] Peter: That is a really important point – the fact that we have these dual systems that work very tightly together. Having worked offshore a lot, one of the biggest challenges that you will get is turbid water or rapidly changing conditions. You might have an issue with the camera, but you still have the acoustics to fall back on and then the systems will actually compliment each other, as conditions change. It’s always nice to have that redundancy built into the system.
[00:29:38] Morgan: Reliability is essential in an autonomous product. The customer must have the strongest confidence in it. One of the ways we really boost that customer confidence is with how we implement command and control of the vehicle.
This is done through our Subsonus product, which provides low frequency acoustic communication. It’s like an underwater modem, and low frequency acoustics are really very reliable. Radio systems and optical communication systems are typically quite short range and are highly impacted by conditions. So, turbidity is going to be a big problem with optical systems, whereas the low frequency acoustics that we have between Subsonus and Hydrus is a reliable backbone of underwater communications. This gives our customers confidence that they are always going to be able to get and watch the vehicle vitals as it is completing a mission, and it also means that they can respond. So, if the operating environment at the surface is changing (for example, current conditions or emergency on the vessel), it means you are allowing them to intervene and make the changes they need to. So it empowers our customers to be the best decision makers that they can be.
[00:30:53] Peter: This is true. I have seen it a lot with different kinds of vehicles offshore. There is always going to be an issue posed to an underwater vehicle when you have a tether involved, as on remotely operated vehicles. The second problem area is the thrusters. Whether that is water ingress into the system or actually entanglement of things through the thrusters.
[00:31:29] Morgan: A traditional thruster has a central hub and has spokes that hold the central hub. So, you have a rotating part next to a stationary part. What that means is that anything that a thruster ingests, it can wrap around one of those components and then stop the other and it will bind and jam. What does this mean for an autonomous vehicle? Vehicle loss – lose your thruster, lose your vehicle.
With Hydrus, we knew from the start that we couldn’t have that. We are using a hubless thruster, which is actually driven by the perimeter, so there is no central hub. You can see right through the middle. The critical difference this gives you is if anything it does ingest can be ejected. If the thruster were to ingest seagrass, for example, it will go straight through the thruster while it’s operating because there are no stationary components for it to snag on. This also works for debris, such as fishing nets and scraps of rope that would really be the end of a mission or the end of a vehicle for some of the traditional systems. Hydrus can actually take it and just spit it straight back out of the thruster, giving a very high degree of reliability. This is essential for autonomous vehicles, particularly if you are working in the complex environments that Hydrus was designed to be good at. For example, the subjects are often close to the seafloor, which can be quite sandy, with a lot of wash that moves debris back and forth. Particularly in shallow water, you have surging conditions that can quickly stir up a lot of debris. It is extremely important that our customers always get the vehicle back.
[00:33:14] Peter: I think the cool engineering side of things here is that we have taken an approach of trying to eliminate the possibility of these common problems in the first place, rather than just trying a bandaid fix and making a gradual improvement. Let’s just try to engineer the problem out from the start.
We have discussed a lot of things from the hardware and the subsystem side of things, but there is some really cool stuff going on with Hydrus on the software side.
We have discussed how Hydrus works on predetermined missions where it can autonomously navigate from waypoint to waypoint and collect high quality data and perform functions at each of these waypoints. But what about taking this to the next level of autonomy? When discussing autonomy, we like to think about terms such as task based mission planning, and that is where we have a lot of autonomous vehicles at the moment.
There is waypoint level planning and task based planning, however, we want to take this autonomy to the next level. This is referred to as goal based mission planning, where we basically can tell the robot to perform a goal. For example, we want an area mapped to this resolution and let the vehicle take care of it itself and make a lot of decisions on-board without the user having to intervene. Let’s talk a little bit about how we have actually enabled this major shift to happen.
[00:34:39] Morgan: A key component here is that Hydrus is an open platform – a decision we made early on. It’s quite a significant offering to our customers. We have worked with our early customers from the start to make sure we delivered it and they have definitely wanted it. This provides the ability for the customers to actually run their own code on the vehicle itself, live.
The way we do this is to provide them a secure area of the computer to guarantee resources such as processing power, memory and timing between events. We also have a system of standardized information exchange on the vehicle. We support industry standard messaging systems, such as robotic operating systems and provide an API that allows access to the various subsystems such as acoustic coms and payload lighting. This means that the customer can have quite a fine degree of control over things that they need to complete their own tasks.
What does this look like? Well, computer vision is probably the most common problem that the customers are trying to solve. For object detection and classification, customers can actually train their own neural nets and can execute these in real-time on the vehicle. They can train these on lots of data that they have collected specific to their application. They can use the outputs from these neural nets to actually seed navigation instructions to the autopilot on Hydrus.
For example, we are working with customers that are tracking particular sea life and they want to identify species for cinematography. They have tracking applications and it means they can train their own software to work with their own data sets, and then run that on the vehicle. It really hands a lot of creativity to our customers. It means we are empowering them to be able to solve really complex problems using an open architecture and cost effective platform.
[00:36:45] Peter: That’s right, some of the applications the customers are using this open platform side of Hydrus are really unique and interesting. Some of the other applications are things like change detection. In this case, looking at strategic environments and having Hydrus perform planned and routine surveys and having the vehicle actually determine if something has been introduced or has something been removed from that strategic environment.
Another application of this ability to run the code on-board is object detection and classification. An example where this is being used at the moment is Hydrus being tasked to investigate a point of interest. The vehicle will maneuver to that point of interest and it’s then able to determine if at this point there is a specific object or not and then it can make decisions about what to do next. This is all done on-board without having to communicate back to a mother vessel. So you have inherently secure systems operating in strategic environments when performing object detection and classification.
I mentioned earlier that one of the most common problems with traditional remotely operated vehicles was the tether. Obviously, Hydrus has cut the tether and has enough on-board autonomy and smarts, as well as the acoustic command and control side of things, to operate in complex environments, without needing a human piloting the vehicle. But I guess there are some other less obvious benefits to being tetherless so I would say that there wouldn’t be a drone revolution if there’s a tether involved. It is these areas that we want to operate in. We really want high resolution data from these areas that are quite complex.
An example of the complex environments that our customers operate in is shallow water with coral areas and overhanging structures and are complex from a bathymetry perspective. Typically, there would be a lot of sharp edges around the coral structures – a nightmare if you are trying to operate ROVs as tethers get caught around the coral. The coral, being sharp, can actually cut the tether and it’s a bad day when you lose your robot. We don’t want to have the chance of anything like that happening.
In the built environment, when we are looking at man made structures (jetties, offloading facilities, offshore platforms, monopile structures around offshore wind farms), these are also quite complex. There are cables and piping and all sorts of things that are a nightmare for a traditional tethered vehicle to get into and maneuver in such a complex way that you can actually look at what you need to, whether that its welds or anodes, or marine growth on these structures.
One of the other less obvious things that happens offshore is you get changing currents. As the tide turns, the current will start pushing in a different direction. So if you are in an area with a remotely operated vehicle, you can have your tether spread out in one direction, and all it takes is a slight change in the current, and it is pushed in a totally different direction, which can really increase chances for entanglement. So really the only way forward is to go tetherless.
[00:40:14] Morgan: Hydrus uniquely takes some of the technology that is found on multimillion dollar vehicles and it puts it in the hands of a much wider range of people. And, because we are harnessing high volume manufacture with vertical integration, we have got a single, yet very flexible platform.

Hydrus can drive down customers’ operating costs because they are using a single product to solve some varied and complex problems. This also really increases the volume and the quality of data that you can collect, and this is what customers need for good decision making.
Hydrus, in a lot of cases, allows you to take the human out of the loop, which has several advantages such as removing bias. For example, if you are collecting a lot of maritime data and you are using manually piloted vehicles, there will be bias in how different pilots of the vehicles choose to fly and how their eyesight works for it. Hydrus gives you an opportunity to remove people and this bias because the reality here is that human factors are often actually the biggest causes of both errors and costs.
[00:41:25] Peter: Exactly. Very often we have seen issues being put down to human error. So, let’s try and take that human out of the system and have a really repeatable system like Hydrus.
From my side, when we are talking about the future of underwater drones, what Hydrus does is it actually opens up new markets. For instance, customers who might not necessarily be traditional users of underwater robotics but they really want to use the data.
I think a good comparison here is that some of the biggest commercial users of aerial drones these days are people like real estate agents, who can use them for aerial photography. I don’t think they were necessarily a key market when the aerial drones were initially being developed, but as the technology became easier to use these new markets emerged.
A great parallel to that is talking about the “blue economy” and when we are talking about that, we really mean the sustainable use of ocean resources. These days we are really starting to get a greater understanding of the human impact on the world and on our oceans.
We are all aware that there are changes taking place in the world with the climate and the ocean conditions. If we want to continue to have sustainable use of ocean resources, we need to be making more informed decisions to actually conserve these resources.
Well, as we have been saying, we need the data. We need our decisions to be data driven. For that to happen, we need to drastically lower the cost and increase the access of that data to people. A product like Hydrus really does demecratize that data and takes it out of the hands of customers with deep pockets and puts it in the hands of people who want to be able to get data very quickly and very easily and have high quality outputs.
I know we are coming up to the end of the webinar here and we will just touch on some of the applications.
Since Hydrus was launched, we have actually had a really great response from multiple industry sectors. We will just quickly discuss some of these applications that Hydrus is working on in the field right now.

Environmental monitoring
[00:43:39] Morgan: One of the applications where we have actually had some pretty immediate success has been with environmental monitoring. Our customers here are delivering reef restoration and have multiple projects in different sites. They are targeting areas of significant biodiversity that have been impacted by global changes to the oceans.
What they are trying to do here is determine the relative success of different coral species that have been planted there. This is survival rates between laboratory grown corals. They are detecting changes in how the health of the reef ecosystem responds and for signals through things that are measured directly from the ocean conditions at the site.
The strength of Hydrus that they are leveraging to do this is the ability to operate in literally turbid waters. The vehicle must negotiate the surge when in only a couple of meters of water, above some coral. You have got a lot of tidal activity and it’s really demanding on the autopilot to do that and make sure that the vehicle can hold position.
They need to capture high quality imagery when there is a lot of shadowing from surface conditions affecting lighting. This requires intelligent control of the on-board lighting system to maintain good consistency in the data capture and ensure integrity of the study being performed with that data.
Also, navigating fragile terrain is required and at close distance. Sometimes you are going to be very close to a piece of coral that you are trying to get a repeat survey off and it’s important that you do not damage the subject. Hydrus being really small has a very low inertia and this allows it to operate safely, quite close to subjects, without bumping into them. And even in the event it did, the low inertia means its not going to do significant damage.
We have worked really hard to verify that the customer’s conditions were going to be a success with Hydrus. We have simulated this first and we have also tested it in a computer controlled wave bloom tank that simulates waves of different heights and frequencies. You can set that machine from quite mild to very wild.
It really shows us that the vehicle package as a whole is working – thrusters, sensors, autopilot all have to be working in harmony to make sure that it will really perform in these challenging surge conditions.
Commercial Space
[00:46:02] Peter: Hydrus is also showing success in the commercial space as well. There are some problems that traditionally had been poorly tackled and Hydrus is doing a great job in actually delivering data to clients in those areas. Some examples of these are repetitive asset inspection tasks, whether that’s offshore wind farms or net inspection in the aquaculture space. What Hydrus can do there is deliver precise repetition that humans can’t actually replicate time and time again on pile after pile on a large wind farm. Hydrus removes the subjection bias of the vehicle operator and it means you get consistent data time and time again. When you do long term analysis and see, for example, if there is scour change around a pile, or degradation of a net, or marine growth, you can do this on a regular and repeatable basis. This provides a lot of granularity and you can track these long term changes.
Another cool use that we can talk about with Hydrus that is happening at the moment is very low logistics hull inspection. What Hydrus can bring here is its so small and easy to deploy. You don’t need to necessarily board a vessel to inspect a hull. You don’t need to lower a vehicle over the side on a tether and connect up to the ship’s power. So we have negated those issues and it means you can do these things very rapidly and at a very low overhead cost.
So that’s why I think Hydrus is one of these amazing tools that will hopefully link to the drone revolution underwater.
[00:48:04] Morgan: It certainly will and it’s important for an AUV that the customer can change it. With Hydrus you can quickly reconfigure the vehicle. It will change its neutral buoyancy, and that way you can have it working fresh or salt water. So if you are leasing out the system, you have to move between lakes, rivers etc, it is really easy to change on the vehicle.
[00:48:23] Peter: That opens up reservoir inspections, where we have different densities of water layers. Even within oceans, going from one part of the world to another, you will have different densities of the water. We have the ability to trim the vehicle and we make sure we are always having the right buoyancy level for the vehicle despite changing conditions.
Yes, it is. We have Hydrus doing mooring chain inspections at the moment. It not only has the ability to look at the chain but what it can do is actually go down and look at the anchor. This is a challenge for a lot of vessels, even larger rigs and platforms, to make sure that when they put their anchors, they are actually dug into the sea bed properly. So, in this scenario, we have customers deploying Hydrus to actually inspect around the anchor and then survey back up the mooring chain and be recovered to the vessel.
This gives them peace of mind and confidence that they are secured more to the sea bed and their chains are doing exactly what they expect.
A question from Luis: Is Hydrus a restricted item for shipping?
[00:49:50] Morgan: No, it’s not. The small size of the battery meant we were able to have it UN38 compliant – this is what you need for your phone or anything else to be able to just take it on the aircraft. It makes transport simple, as you said, put it in a backpack and go. Because of the certification built into the product, you don’t have any hassles of the airport and that takes a lot of the stress out of it.
A lot of larger autonomous vehicle systems are battery powered and it’s a growing issue how you can deal with restricted shipping. I can see why this is a question that a lot of customers are going to have.
[00:50:27] Peter: Thanks for answering that. And thank you everybody for joining. Any questions that we haven not answered, we will answer in email form and send that out to everyone and we will distribute the recording of this webinar.
We hope to have you join us next time. We will cover a few customer use cases and really get into the data side of Hydrus and go through what you could expect as a customer from the results of the surveys and inspections that Hydrus will deliver.