Case Study

Published on:
AIMS is a tropical marine research agency with world class facilities around Australia. Established in 1972, the institute’s primary function is research for sustainable use and protection of the marine environment. It has highly developed capabilities in marine biodiversity; impacts and adaptation to climate change; and, water quality and ecosystem health. As a trusted name in marine science, AIMS’ research programs support the management of tropical marine environments around the world.
Advanced Navigation collaborated with AIMS to conduct a simulation at the institute’s tropical marine test range, known as ReefWorks, located near Townsville, a city on the north eastern coast of Australia within proximity to the Great Barrier Reef. The test range, which opened its doors to industry in 2022, is one of the first marine technology test ranges in the world located in tropical waters.
For the exercise, Advanced Navigation’s micro hovering autonomous underwater vehicle (micro hovering AUV), Hydrus, was tasked with autonomously mapping a predefined area of the seabed in search of specific points of interest—which, in this scenario, were hidden objects intended to represent underwater mines.

Numerous challenges accompany a scenario of this nature:
Fortunately, Hydrus was purpose-built to address these very concerns. Thanks to its compact size and autonomous capabilities, the mission could be executed with cost-efficiency and minimal logistical complexities. To illustrate this, all of the necessary equipment for this exercise could be conveniently transported in just three transit cases, each weighing less than 21 kg. Hydrus itself, weighing a mere 7 kg, can be deployed and recovered by a single individual. This obviates the need for heavy transportation, on-site storage, large vessels, cranes, or a team of specialists.

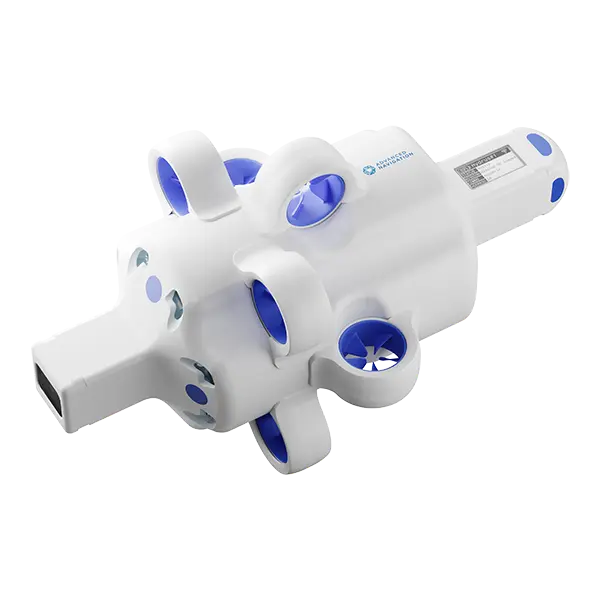
What truly distinguishes Hydrus is its ability to operate effectively within the challenging tropical waters environment, setting it apart from comparable products in the market. Being developed in Australia provided a local advantage, as Hydrus underwent extensive testing in warm tropical waters during its design phase. Additionally, its thrusters were thoughtfully designed with the challenges of suspended sediment in mind. The AUV’s impellers offer a higher level of control authority than any comparable product on the market, rendering them resilient to suspended sediment and complex water flow.
Regarding safety, this simulation presented an opportunity for the Advanced Navigation team to showcase a unique solution aimed at minimizing risk to personnel. Typically, USBL and GNSS systems are affixed to crewed boats. However, in this exercise, Advanced Navigation’s Subsonus and GNSS Compass were integrated onto Surfbee, an autonomous uncrewed surface vessel (USV). Leveraging the autonomous capabilities of Surfbee, this setup allowed the crew to maintain a safer distance from the scouting area.

The end-to-end operation, from deploying to recovering Hydrus, took less than 30 minutes. Hydrus performed flawlessly right out of the box, requiring minimal mobilization time and experiencing no delays. Coupled with the use of a small vessel, this efficiency allowed the team to swiftly gather the necessary data to complete the mission. In fact, due to the rapid turnaround time, the team ran the simulation two more times with each operation completed in under 30 minutes.
Notably, by repeating the simulation, the team observed that the mine-like objects had shifted positions on the seabed between each operation. This not only highlights the complex currents in tropical waters but also underscores the potential safety risks had the operation been conducted only once, as typically expected with traditional systems.

To locate the objects, Hydrus autonomously followed a predefined search pattern within a set perimeter in the water, in a path akin to mowing a lawn. While executing the search pattern, Hydrus’ camera successfully identified points of interest and captured high-accuracy imagery of the target objects.
As is customary with all simulations involving Hydrus, the data collected during this exercise will be used to train Hydrus’ AI model, enhancing its capability to pinpoint and inspect points of interest on the seabed with even greater precision and detail. Conducting more simulations will continue to enrich Hydrus’ onboard AI, improving its overall capabilities.
The successful completion of this simulation at ReefWorks validates Hydrus’ ability to provide a data collection solution that not only minimizes logistical effort but also allows for rapid deployment compared to other systems. Moreover, it does not require trained specialists, keeping the overall costs minimal. This enables users to deploy Hydrus quickly, safely and cost-effectively wherever it is needed.

Hydrus takes the drone revolution underwater with the most advanced sonar, navigation and communications systems of any subsea vehicle. It contains a DVL, USBL, INS, and an acoustic modem, all tightly integrated. This enables highly reliable, fully autonomous underwater missions at your fingertips. It also provides obstacle detection and collision avoidance.