
Subsonus USBL2 Technology Accelerates JM Robotics Small-Scale ROV Program With Accurate Acoustic Heading
Share:
Published on:
Key Points
- Subsonus in unique USBL2 configuration provided accurate ROV heading and fast, reliable motion data using acoustic communications.
- The combination of full INS, encoded bi-directional data transfer, and heading made Subsonus a practical solution for working in very challenging conditions.
- The ultra-small size, minimal weight and straightforward installation of the Subsonus made it possible to be mounted with minimal effect on operation of a highly agile and lightweight ROV.
- Easy DVL integration and cohesive data fusion with the Subsonus system proved itself to be highly reliable and accurate, even in noisy and unstable conditions.
- Subsonus provided a key fix to a complex set of conditions that no other USBL could match, enabling a cost-effective solution to be delivered.
JM Robotics (Norway)
JM Robotics was established in 2016 by Johan Hellstrøm and Magnus Kjelland-Olsen. Two weather-beaten guys with extensive experience in ROV, offshore and work diving. The company has quickly established itself to become one of Scandinavia’s largest suppliers of small, robust ROV systems, custom designed for customers in the maritime industry. We build tailor-made ROV systems and underwater drones, and are a Scandinavian dealer of subsea parts from Blue Robotics, California.
We know what it’s like to be underwater, and have the knowledge needed to develop sustainable solutions for aquaculture and other maritime industries. Our team has expertise that ranges from professional diving, shipping and farming to the development of software and ROV systems to streamline work tasks, reduce costs and make workplaces at sea safer.
Table of Contents
- The Challenge: Developing an Agile, Miniature ROV That Provides Accurate Acoustic Heading and Absolute Position in Difficult Shallow Water Conditions
- The Solution: Acoustically Transferred Heading Using Subsonus in USBL2 Configuration – Acoustic Compass
- The Result: Accurate ROV Navigation Using Acoustic Communications
The Challenge: Developing an Agile, Miniature ROV That Provides Accurate Acoustic Heading and Absolute Position in Difficult Shallow Water Conditions
Submarine pipeline inspection is critical to the safe transfer of oil and gas from off-shore rigs to storage and processing facilities on land. Typically, large and heavy work-class ROVs are used for this purpose, however, these ROVs remain suited to large scale operations and at suitable depth. What happens, however, when depth and other conditions are not favorable? For example, shallow water surveying where the surface vessel of a work-class ROV cannot access might entail using divers or perhaps not surveying at all.
JM Robotics has extensive ROV design and construction experience for a range of maritime industries and this led them to being commissioned to solve the above problems for a major energy provider. To further complicate matters, the pipelines to be surveyed are often buried several meters beneath the seabed.
The task of the survey itself is to measure the effectiveness of the cathodic protection (CP) of the pipeline infrastructure and identify corrosion hotspots that require or will require maintenance. Cathodic protection is a means of increasing the corrosion resistance of metal pipelines in seawater. CP uses pieces of sacrificial metal anodes (for example, magnesium) that are electrically connected to the pipeline at regular intervals. A low electrical current is passed through the pipeline, creating an electrical circuit between the pipeline (cathode), the CP (anode) and the seawater (electrolyte). The CP anodes are more easily corroded than the pipeline material and therefore corrode first, leaving the pipelines intact. In this case, dredging of the seabed to access the pipeline is not commercially viable, as well as risky, and this means that non-contact CP testing is required.
Non-contact FiGS (field gradient sensor) type CP sensors from Force Technology in Norway that detect electrical fields in seawater were fitted to the prototype HD3 ROV. This type of remote electrical inspection, conducted at regular distances along the pipelines, is able to provide valuable additional prognostic data that can be used in decision making. Another method for CP testing is metal-to-metal contact with the pipe via a test probe. This is not a viable option for two reasons; the pipes are buried, and direct contact testing requires perforating the protective coatings on the pipes, which itself creates new corrosion points. The advantages of non-contact sensors is obvious, however, the technology also provides a superior result in that a far more comprehensive analysis of cathodic protection and pipeline condition can be made, including long-term projections of required future maintenance.
For JM Robotics, the first challenge was to design an ROV that could do the survey, but also for it to require no more than two people to lift and deploy it. This is because the operating depths are shallow, so require a small surface vessel and minimal crew. Significantly reducing carbon emissions, expenditure, vessel and crew sizes is also an increasingly important aspect of operations for clients. As a result, the maximum ROV weight was capped at ~50 kg (in air). The requirement for lightness immediately discounted a range of components that are either too big and/or heavy or would otherwise compromise maneuverability of the ROV. The same goes for the navigation system – prevailing conditions that the survey is being conducted in present several challenges to the ROV navigation system:
- The pipelines are ferrous so generate large amounts of electromagnetic interference, therefore, eliminating magnetometer based heading. The typical alternative is to use a fibre-optic gyroscope (FOG), however, the cost and size of many FOG devices makes this type of device impractical.
- The navigation system must be able to reasonably tolerate additional noise generated by boats operating in the area – the survey region is busy with commercial fishing vessels.
- ROV heading must be known for the purposes of accurately piloting the ROV and for reliable and accurate geo-referencing the absolute position of the pipeline and any CP hotspots.
- The USBL must be hardened against signal reflectivity from the seabed, submerged objects and the water surface.
Johan Hellstrøm, Technical Manager at JM Robotics sums up the challenges:
“This was more challenging than we expected because of poor or no visibility, a lot of current, shallow water with obstacles such as fishing nets. The pipes are magnetic also. There were also disturbances due to boat engines and water jets that needed to be handled without disrupting the USBL or sensors. There were a lot of very difficult situations.”
Johan Hellstrøm, Technical Manager, JM Robotics.
With little to no visibility to the ROV pilot of the pipelines, the ROV must be able to accurately report its position and heading. Accurate navigation data is critical to building true digital twins of the sight unseen infrastructure that clients can rely on.
JM Robotics required a heading solution that enabled them to accurately navigate pipelines buried beneath the seabed. The Subsonus USBL2 functionality provided the required ROV compassing without using magnetometer or fibre-optic gyroscope based heading.
The Solution: Acoustically Transferred Heading Using Subsonus in USBL2 Configuration – Acoustic Compass
The small size of the JM Robotics HD3 ROV necessitated using a USBL system that was ultra-compact and would not impede maneuverability or affect buoyancy of the vehicle. In this case, the Subsonus was literally found to be the only viable solution that had the necessarily small physical dimensions and minimal weight for the project. Complimenting this, the straightforward installation and connectivity of the Subsonus made the system easy for the team to set up, test and verify for both ROV and surface vessel.

Subsonus leads the market in terms of size, flexibility and performance.
“I would say that this is effectively USBL system number four we have tested. We have written-off a lot of things that we probably could have tested because we already know they will not work in this application. The Subsonus equipment has the right size, fuses well with the DVL and provides an “acoustic compass”, which is one of the things that set it aside from the competition.”
says Hellstrøm when asked about competing USBL systems.
A Multi-Pronged Approach
Subsonus USBL2
The Subsonus contains a high-accuracy MEMS-based inertial navigation system (INS) that provides roll, pitch, heading, heave and acceleration data of the unit. INS data from the inertial sensors is fused and processed using Advanced Navigation’s exclusive AI-enhanced algorithm technology. The neural network component of the AI is capable of multiple levels of learning and over time or “experience” can detect and compensate for sensor error and drift considerably more effectively than non-AI inertial navigation systems.
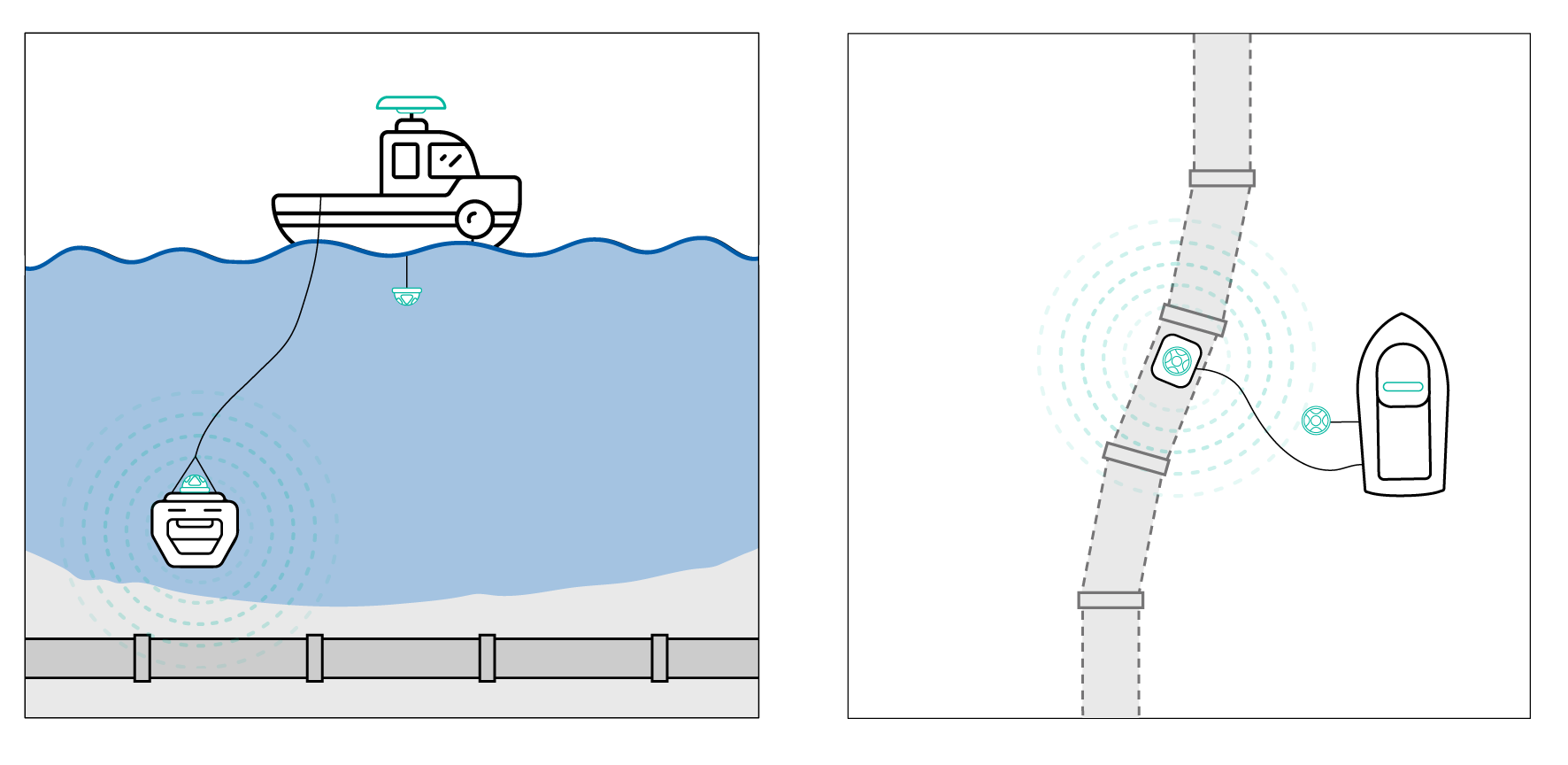
The surface vessel has a GNSS Compass installed to provide satellite derived absolute position and heading to the surface vessel Subsonus. As a result, the Subsonus “knows” where on the surface of the Earth it is and in which direction it is headed without requiring a subsea heading solution, such as a highly expensive fibre-optic gyroscope (FOG). The USBL between the two Subsonus units enables the position of the ROV to become known relative to the surface vessel Subsonus. The ROV Subsonus can then be updated with its absolute position and heading from the surface vessel using acoustic data transfer. Performing USBL calculations at the ROV and surface vessel significantly reduces navigational uncertainty as each Subsonus is effectively two components of a single system that is able to accurately resolve surface vessel and ROV orientation and position.
Acoustic transfer of data between the Subsonus units occurs approximately once per second (this depends on the number of Subsonus units being used – USBL2 is not limited in the number of remote Subsonus units). The continuous transfer and processing of USBL, INS and GNSS data at each Subsonus transducer, with additional DVL input at the ROV, delivers very reliable performance. Navigation and position data from the ROV Subsonus is fired back to the survey head system via the ROV tether.
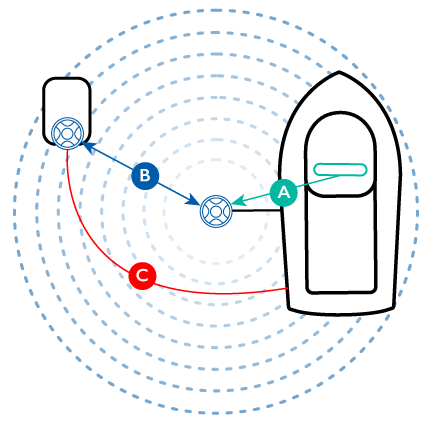
Image depicting how position and heading for the ROV is derived. Absolute position and heading data (A) of the vessel is provided by GNSS Compass that connects to the surface vessel Subsonus. The surface vessel Subsonus pings the ROV Subsonus to determine its relative position and provides this data (B) acoustically and via tether to the ROV Subsonus. The ROV Subsonus then determines its absolute position and heading from the bearing fix and sends navigational data (C) back to the head system via the tether
Shallow water conditions can lead to much uncertainty with many traditional USBL systems (transducer-to-transponder) as the angle of communications between surface vessel and tracked object becomes more acute. The Subsonus USBL2 configuration provides superior performance and far more reliable results through performing USBL calculations and applying intelligent filtering at both the ROV and surface vessel. The HD3 ROV is designed for operating at depths of basically 0 to 300 m and at speeds of up to 4 knots. In this case, the ROV is likely to end up beached or in water too shallow for effective USBL as the pipeline reaches land, at which point a GNSS receiver built into the ROV provides position.
DVL
The ROV is equipped with a DVL (Doppler velocity log) for acoustic velocity and altitude (off seabed) measurement that is used as a secondary input into the navigation system. The DVL sends acoustic signals to the seabed and, by measuring any Doppler based frequency shift in the reflected signals, is able to provide a reliable reference for velocity and altitude that is relative to the seabed. This is especially useful when operating in strong currents and in turbulent, noisy conditions.
A DVL is necessary also to maintain precise altitude off the seabed and suitable working distances between the pipeline structures and the FiGS sensors. For buried pipes, twin FiGS sensors are used that can be used to triangulate the location and path of the pipelines. The combination of Subsonus and DVL improves the accuracy and precision of the navigation solution, which results in smoother navigation data and higher quality survey output.
Post-Processing
The navigation system outputs time-stamped georeferencing information into the survey data, which is post-processed by Force Technology during corrosion protection analysis and survey modeling.
The Result: Accurate ROV Navigation Using Acoustic Heading
The “acoustic compass” heading solution provided by Subsonus in USBL2 configuration meant that the ROV project is commercially viable. Subsonus USBL2 provides an elegant, reliable and cost effective heading solution that opens new possibilities for underwater applications that use USBL. Magnus Kjellard-Olsen, General Manager at JM Robotics briefly explains the HD3 ROV.
“We are building a very high-end, but low-cost “taxi” to gather data from places that typical work-class ROVs cannot go. With our new mini HD3 ROV, we can deliver a full suite of pipeline CP information to the client as well as significantly reduce costs.”
JM Robotics found that using Subsonus immediately provided the additional navigation functions and accuracy that they required. This particular application requires complex ROV piloting, using six-degrees of freedom of movement, to follow the hidden pipelines and successfully battle currents and avoid various obstacles. This makes ROV heading even more essential to the solution.
ROV piloting is also improved when visibility becomes difficult, with Subsonus providing continuous position and acoustic heading data regardless of water turbidity. An added benefit is that having accurate ROV position and heading can provide additional safeguards against collisions which, particularly in resource extraction applications, can be devastating to the environment.
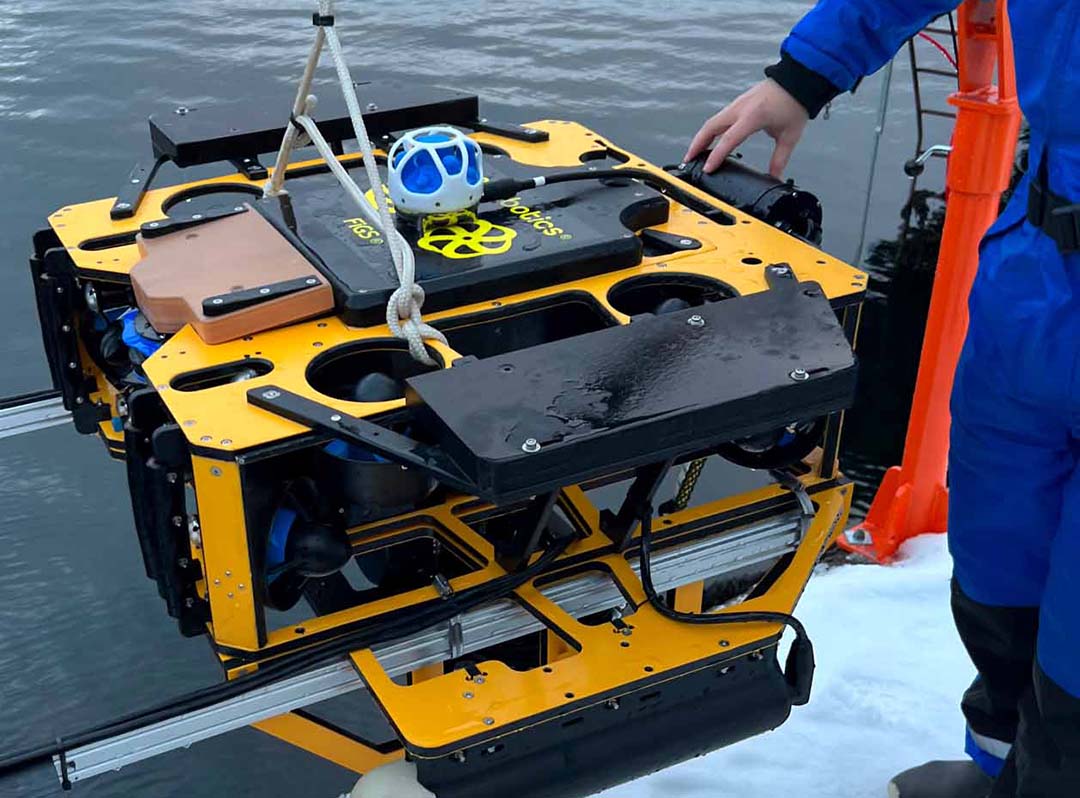
HD3 ROV in field testing with Subsonus clearly visible at the top of the ROV. Note the compact size of the vehicle
Hellstrøm wraps up the success of the integration:
“Everything in this package is exactly what we need. We have fully tested the navigation system with DVL input and, due to the success of the system, we are going to integrate the acoustic compass function of the Subsonus into the navigation control system instead of using the sensors that are on the ROV. We are very impressed with how stable this system is when set up and everything is communicating and working. It is proving to be highly accurate.”
Concludes Hellstrøm

Subsonus
Subsonus is a next-generation USBL underwater acoustic positioning system that provides high accuracy position, velocity, and heading at distances of up to 1000 metres. The system features an industry-leading calibrated hydrophone array combined with an internal tightly coupled INS, all packed into a miniature titanium enclosure small enough to fit in the palm of your hand.