A new generation AHRS has arrived
Orientus is not recommended for new designs. Certus Mini A now available.
View Specifications
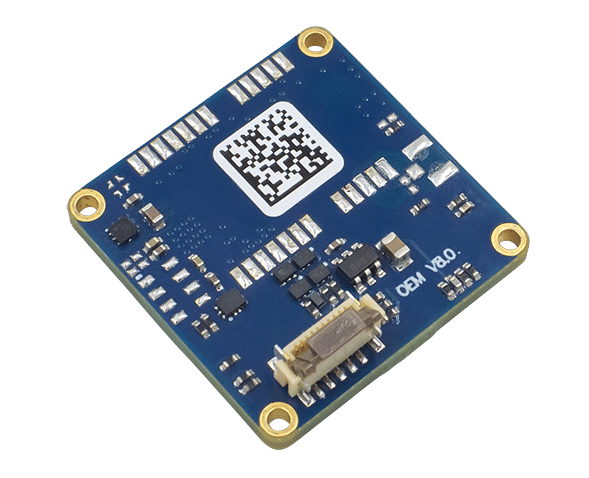
Orientus (NRND)
Orientus is a miniature IMU and AHRS that provides accurate orientation under the most demanding conditions.
Roll & Pitch
0.2 °
Heading (Magnetic)
0.8 °
Bias Instability
3 °/hr
Update Rate
1000 Hz

Orientus combines temperature-calibrated accelerometers, gyroscopes, and magnetometers with a sophisticated fusion algorithm to deliver accurate and reliable orientation. It is available in both OEM and rugged packages.

Features
High-Performance MEMS
Orientus contains high-performance MEMS sensors that are put through Advanced Navigation’s intensive 8-hour temperature calibration process. This provides the highest accuracy possible from this sensor class and outputs consistent accuracy over the full temperature range from -40°C to 85°C.
Automatic Magnetic Calibration
Orientus features fully automatic magnetic calibration that updates every time the unit moves and removes all requirements on a manual calibration process. This provides reliable accurate heading through changing environments.
Linear Acceleration Compensation
Orientus uses an innovative algorithm to compensate for linear accelerations. This allows Orientus to maintain accurate roll and pitch through short term linear accelerations that typically cause significant errors in competitors systems. For long term linear accelerations Orientus supports the addition of an external GNSS receiver for full acceleration compensation.
High Update Rate
Orientus’s internal filter runs at 1000Hz and data can also be output at this rate over high speed RS232. This allows for control of dynamically unstable platforms.

Reliability
Orientus has been designed from the ground up for mission critical control applications where reliability is very important. It is built on top of a safety oriented real time operating system and all software is designed and tested to safety standards with fault tolerance in mind. The hardware is designed and manufactured to mil standards.
Applications
Robotics
Gimbal Stabilization
Human Motion
Marine
Specifications
Orientation
Sensors
Accelerometers
Gyroscopes
Magnetometers
Communication
Hardware
Downloads
Datasheet
Reference Manual
3D Model
Orientus Manager
Version 7.3
9 Apr 2024
Orientus Manager is the software provided for testing, configuration and logging with Orientus. Java 11 is required to run Orientus Manager v7.0 and later. Adoptium JRE 11 is the recommended Java installer. Please see the reference manual for more information.
Orientus Firmware
Version 5.6
27 Jul 2021
The latest firmware for version 3.0 and later Orientus hardware. This can be loaded onto Orientus using the Orientus Manager software.
Version 1.5
25 May 2018
The latest firmware for pre-version 3.0 Orientus hardware. This can be loaded onto Orientus using the Orientus Manager software.
Orientus SDK
Version 7.3
28 Aug 2024
The Orientus SDK provides example source code for interfacing with Orientus through the AN Packet Protocol. The languages provided are C/C++, Java, and .Net C#.