Motus
Motus is an ultra-high accuracy MEMS IMU that combines low SWaP-C (Size, Weight, Power, and Cost) and FOG-like performance.
Roll & Pitch
0.05 °
Heading (Magnetic)
0.8 °
Bias Instability
0.2 °/hr
Update Rate
1000 Hz

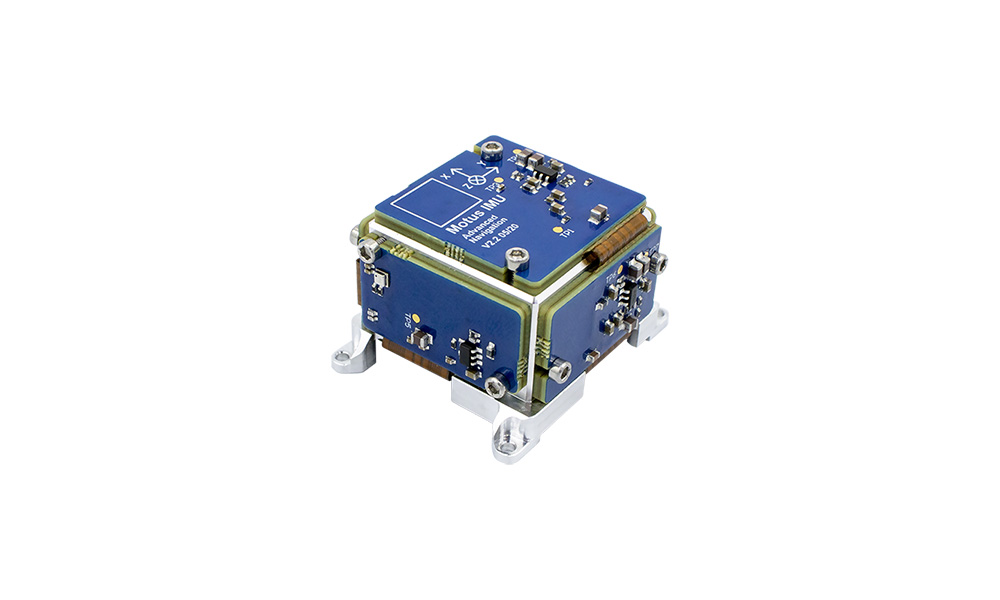
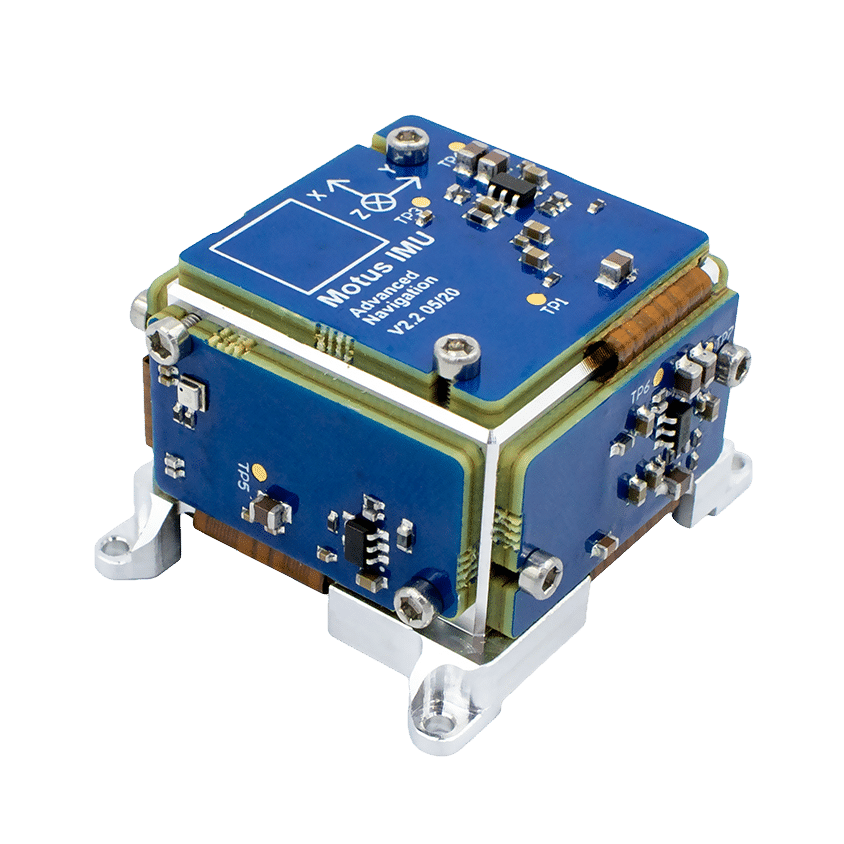
Motus features some of the highest accuracy MEMS accelerometers and gyroscopes combined with a sophisticated fusion algorithm to offer FOG-like performance. Its market-leading SWaP-C (Size, Weight, Power, and Cost) make it ideal for autonomous system applications. Motus is available in both OEM and rugged packages.

Features
Ultra-High Accuracy MEMS
Motus features some of the highest accuracy MEMS accelerometers and gyroscopes currently available. Motus’s inertial performance exceeds some FOG IMUs and is up to 100x smaller and 10x cheaper. Motus is put through Advanced Navigation’s intensive calibration process to provide consistently accurate data over an extended temperature range of -40°C to 85°C.
Miniature Package
Never before has such high inertial performance been available in such a small package. Motus consumes just over 1 cubic inch in volume and weighs only 26 grams. This makes it ideal for weight and size sensitive applications. Motus is available in an OEM package suitable for integration into larger products or an enclosed package for external and standalone use.
Advanced Signal Processing
Motus samples its sensors synchronously at 1000Hz through six individual 24-bit differential ADCs which minimizes noise as well as providing optimal thermal calibration and performance characteristics. 14 separate heavily filtered regulated power supplies ensure that each sensor and ADC is operating off the cleanest possible power supply.

Reliability
Motus has been designed from the ground up for mission critical control applications where reliability is very important. It is built on top of a safety oriented real time operating system and all software is designed and tested to safety standards with fault tolerance in mind. The hardware is designed and manufactured to mil standards.
High Update Rate
Motus outputs temperature calibrated sensor data at 1000Hz as well as filtered attitude at the same rate. This allows for control of dynamically unstable platforms.
Applications
UAV LiDAR
Gimbal Stabilization
Human Motion
Marine Surveying
Subsea Navigation
Specifications
Navigation
Sensors
Accelerometers
Gyroscopes
Magnetometers
Communication
Hardware
Downloads
Datasheet
OEM Reference Manual
Online Version
3D Model
OEM 3D Model
Motus Manager
Version 7.3
9 Apr 2024
Motus Manager is the software provided for testing, configuration and logging with Motus. Java 11 is required to run Motus Manager v7.0 and later. Adoptium JRE 11 is the recommended Java installer. Please see the reference manual for more information.
Motus Firmware
Version 2.41
18 Mar 2024
Firmware for all Motus hardware versions. This can be loaded onto Motus using the Motus Manager software. The change log can be found in the Motus reference manual.
Motus SDK
Version 7.3
28 Aug 2024
The Motus SDK provides example source code for interfacing with Motus through the AN Packet Protocol. The languages provided are C/C++, Java, and .Net C#.
Related Articles

Advanced Navigation Wins Program With BAE Systems In Sweden
10 October 2022
View Post
Advanced Navigation Releases High-Performance, Ultra-Compact Inertial Measurement Unit (IMU)
19 November 2020
View Post