Kinematica
Kinematica easily post-processes inertial data and raw GNSS to achieve higher accuracy position, velocity, and orientation.
Kinematica is a GNSS/INS post-processing kinematic (PPK) software. It processes raw GNSS and INS data to achieve a higher level of accuracy than real-time INS. It is compatible with all Advanced Navigation INS solutions.
Features
Maximum INS Accuracy
Kinematica processes data backward and forward in time with advanced algorithms. This allows it to significantly reduce errors and extract the very best performance possible from an inertial navigation system.
Kinematic GNSS Positioning
Kinematica features kinematic GNSS post processing which provides a 200x increase in position accuracy over standard GNSS. Kinematica automatically downloads the closest RINEX base station data and outputs position to an accuracy of 8mm.

Precise Point Positioning (PPP)
The Precise Point Positioning (PPP) algorithm models GNSS errors to provide decimeter-level positioning accuracy without a base station. PPP can be used anywhere in the world, for example at sea or in remote areas, where real-time kinematic (RTK) accuracy is unavailable.
Forward And Reverse Processing
Kinematica’s PPK algorithm parses data forwards and backwards to fill satellite outages and ignore errors that would normally affect a real time solution. Data is processed in both directions multiple times in order to obtain the highest accuracy results.
Dual Antenna Heading
For dual antenna systems, it supports tightly coupled dual antenna heading processing which significantly increases heading accuracy.
Specifications
Navigation
Spatial Accuracy
Spatial FOG Dual Accuracy
Technical Features
Downloads
Datasheet
Reference Manual
End User License Agreement (EULA)
API Reference Manual
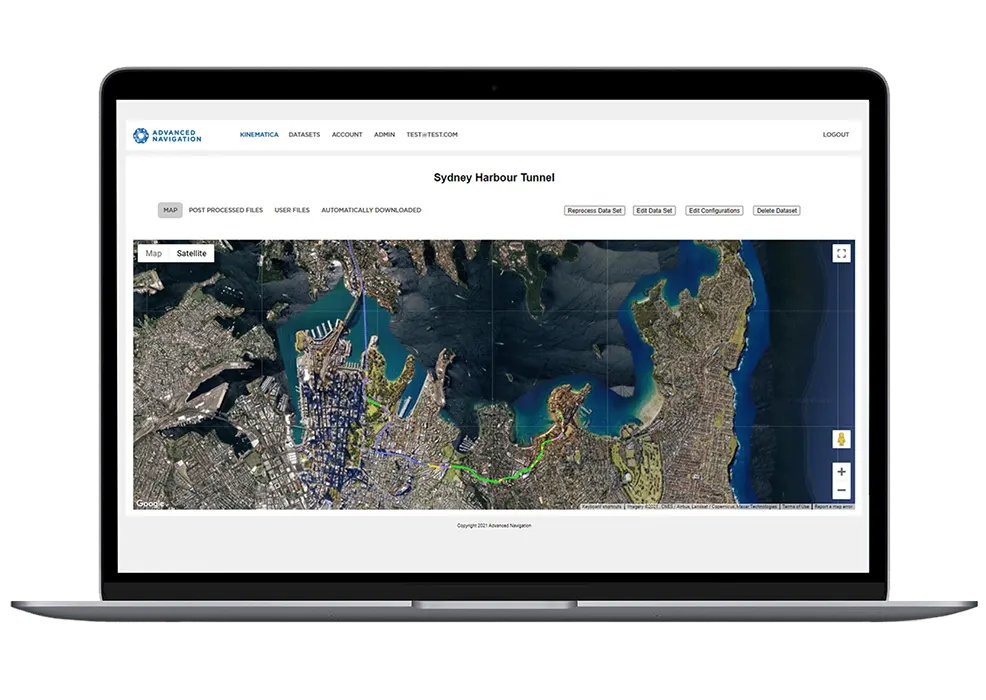
Access Kinematica
Online
Kinematica supports all Advanced Navigation GNSS/INS products and features kinematic post-processing (PPK), forward and reverse processing, and supports automatic loose/tight coupling and dual antenna heading.
Kinematica API
Version 1.2
6 Feb 2018
The Kinematica API provides a Java code example and documentation for integrating Kinematica post-processing into customers applications.