The Challenge with Traditional Navigation Systems
Traditional navigation systems struggle with complex real-world motions. Without accurate knowledge of the initial orientation and position, these systems quickly lose accuracy and drift off course, forcing operators to either endure costly downtime for manual resets or risk operating with unreliable data.
The Fusion engine is built differently. Instead of relying on basic approximations, our advanced algorithms leverage the underlying geometry of 3D motion, resulting in high performance in the toughest of conditions.

Absolute Orientated Convergence
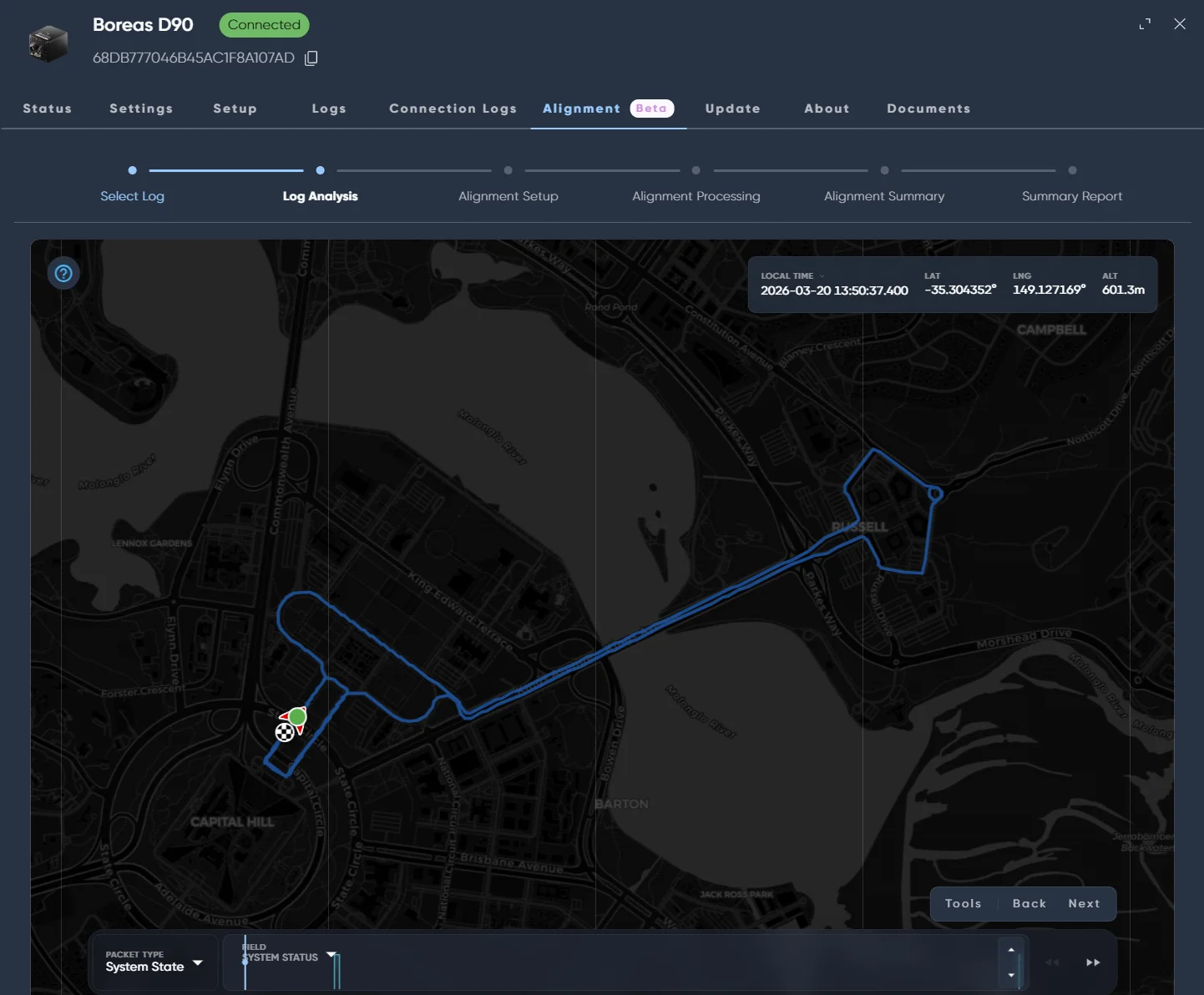
Even if the system starts completely mis-aligned, the Fusion engine can rapidly calculate North, overcoming tedious setup times.*
*Boreas systems only

Reliability in Extreme Environments
Whether it’s a drone executing dynamic manoeuvres or a vessel navigating heavy seas, the Fusion engine maintains a stable, continuous lock on your position.

Absolute Operational Confidence
Uninterrupted operations, heightened safety, and absolute confidence in your navigation data, no matter the environment.
The Capabilities of the Fusion Engine
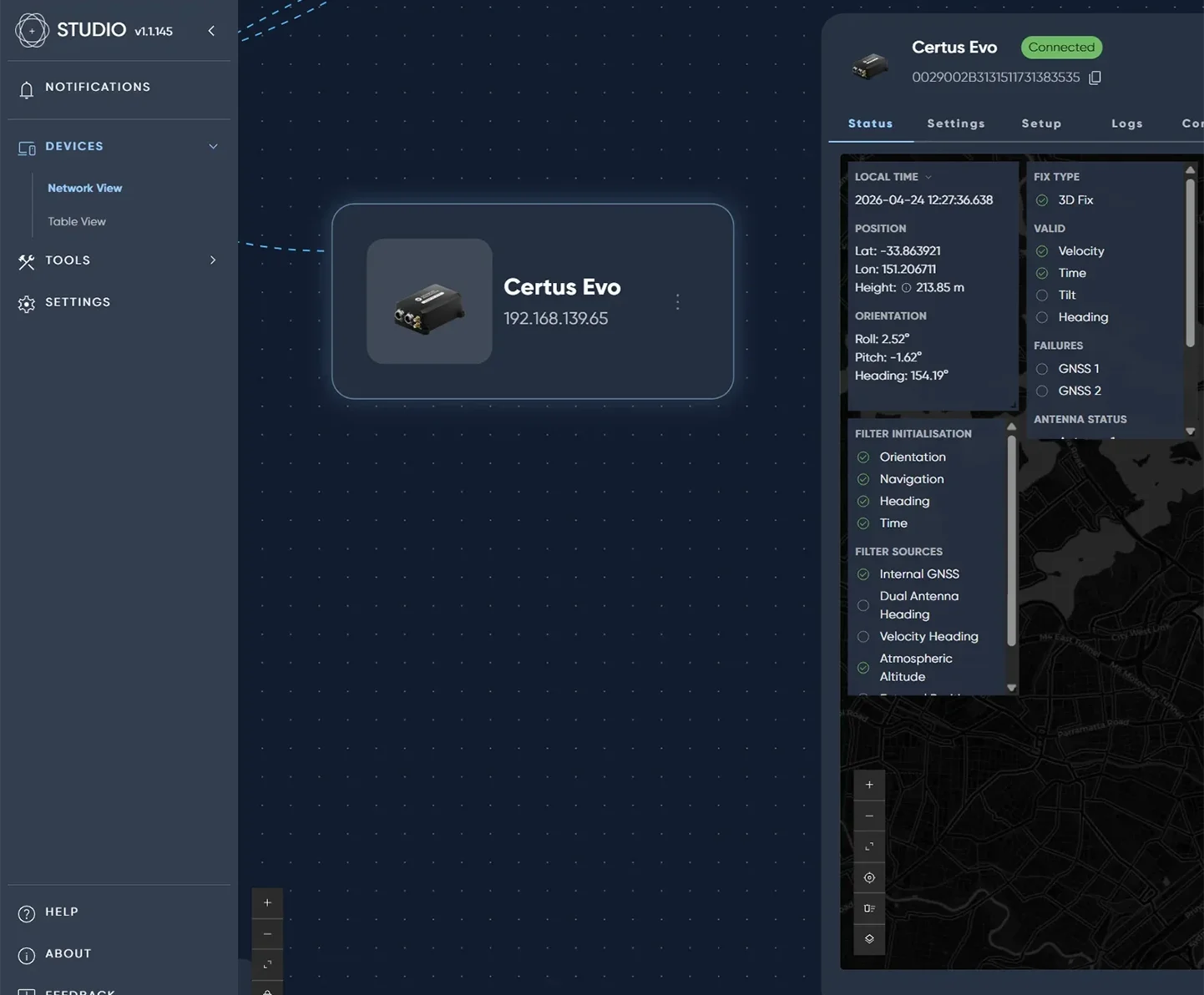
The Fusion engine acts as a dynamic, self-correcting system for your vehicle. It constantly monitors the health of your data and adapts in real time, ensuring the platform knows its exact position, orientation, and velocity, no matter what
Intelligent Sensor Management Adaptive Aiding
The Fusion engine simultaneously processes data from all your available sensor and aiding sources (GNSS, odometers, laser velocity and doppler velocity sensors, and air speed sensors).
Robust Confidence Estimation
Rather than just estimating where you are, the Fusion engine maintains its own solution confidence. This allows it to recognize mistakes and correct itself accordingly. The key advantage is fast and reliable convergence, resulting in consistent navigation performance without the need for constant manual tuning.
How Fusion Benefits You
Fast and Reliable Convergence
Core outputs stabilize rapidly and converge reliability to the navigational truth. Consequently, you can launch time sensitive operations sooner, without waiting for systems to calibrate or second guess data accuracy.
One Solution, Any Vehicle
Whether you are operating drones in the air, autonomous vehicles on land, or vessels at sea, Fusion’s universal engine delivers consistent, reliable performance.
Seamless Sensor Fusion
Optimally fuse sensor data in any configuration and unlock peak performance in any extreme environment. Fusion doesn’t compromise on complexity or accuracy.
FAQs
How does the Fusion engine handle GNSS-denied environments?
By utilizing dynamic sensor weighting, the Fusion engine automatically flags compromised signals and switches to alternative sensors coupled with Advanced Navigation’s highly accurate internal gyroscopes.
How is Advanced Navigation’s fusion algorithm different from a standard Kalman filter?
Traditional Kalman filters estimate navigation parameters directly, which can lead to instability. The Fusion engine calculates the errors around those parameters, resulting in fast convergence and a highly stable engine.
Be The First To Access
Get exclusive updates, launch details, and early access information for AdNav Intelligence.